|
AnimatLab
2
Test
|
|
AnimatLab
2
Test
|
Animat base class. More...
#include <AnimatBase.h>
Inherits CStdSerialize.
Inherited by AnimatCarlSim::CsConnectionGenerator, AnimatSim::ActivatedItem, AnimatSim::ActivatedItemMgr, AnimatSim::Behavior::NervousSystem, AnimatSim::Behavior::NeuralModule, AnimatSim::Charting::DataColumn, AnimatSim::Environment::CollisionPair, AnimatSim::Environment::ConstraintFriction, AnimatSim::Environment::ConstraintLimit, AnimatSim::Environment::ConstraintRelaxation, AnimatSim::Environment::ContactSensor, AnimatSim::Environment::Light, AnimatSim::Environment::LightManager, AnimatSim::Environment::Materials, AnimatSim::Environment::MaterialType, AnimatSim::Environment::Odor, AnimatSim::Environment::OdorType, AnimatSim::Environment::ReceptiveField, AnimatSim::Environment::ReceptiveFieldPair, AnimatSim::Environment::Structure, AnimatSim::Gains::Gain, AnimatSim::Hud, AnimatSim::HudItem, AnimatSim::Link, AnimatSim::ModuleThreadProcessor, AnimatSim::Node, AnimatSim::PidControl, AnimatSim::Robotics::RemoteControlLinkage, AnimatSim::Robotics::RobotInterface, AnimatSim::Robotics::RobotIOControl, AnimatSim::Robotics::RobotPartInterface, AnimatSim::ScriptProcessor, AnimatSim::SimulationMgr, AnimatSim::SimulationWindow, AnimatSim::SimulationWindowMgr, AnimatSim::Simulator, AnimatSim::ThreadProcessor, IntegrateFireSim::CaActivation, IntegrateFireSim::IonChannel, IntegrateFireSim::Synapses::SynapseType, OsgAnimatSim::Visualization::ControlPoint, OsgAnimatSim::Visualization::OsgLinearPath, VortexAnimatSim::Visualization::ControlPoint, and VortexAnimatSim::Visualization::OsgLinearPath.
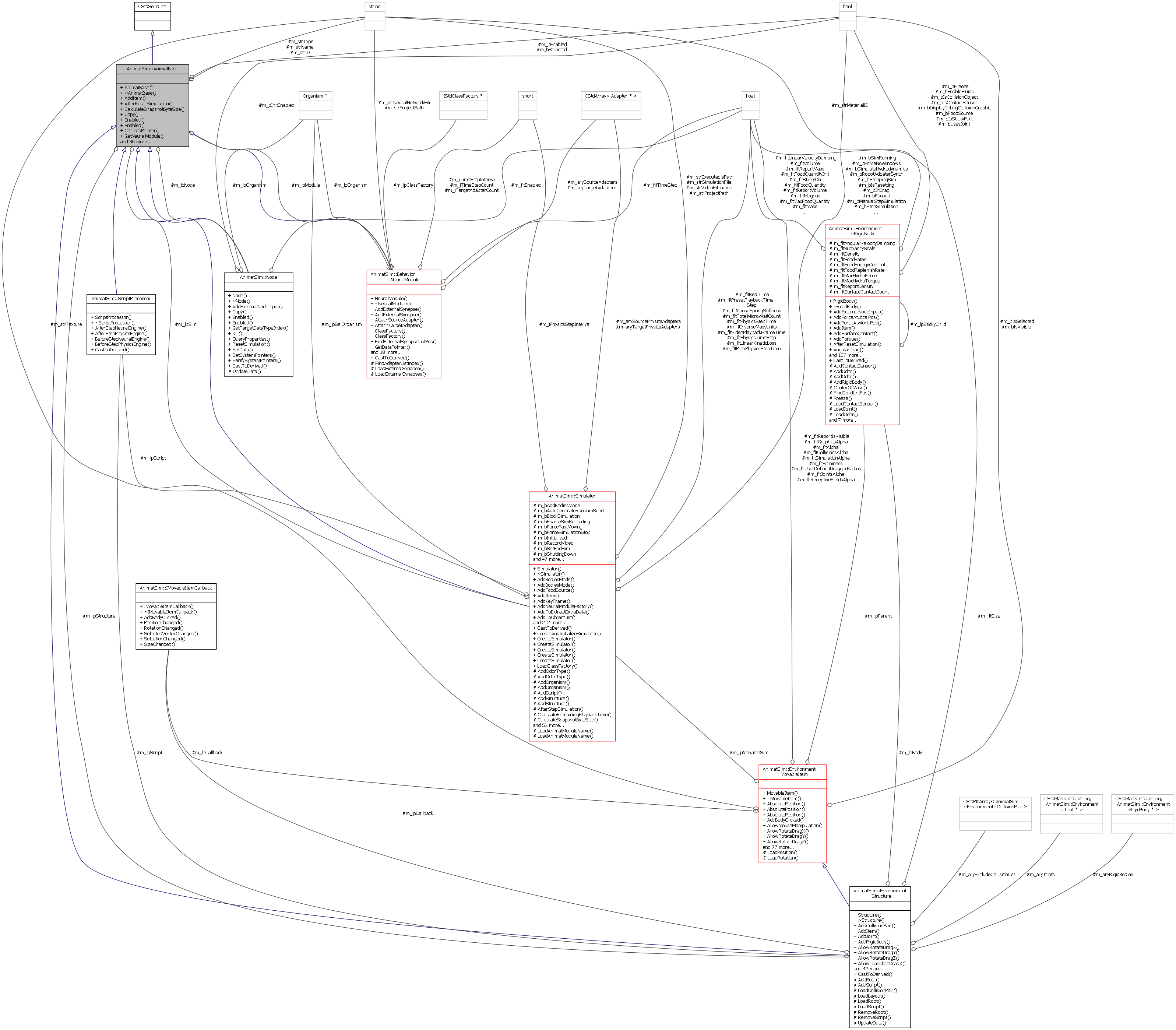
 Collaboration diagram for AnimatSim::AnimatBase:
Collaboration diagram for AnimatSim::AnimatBase:Public Member Functions | |
| AnimatBase () | |
| Constructs an AnimatBase object. More... | |
| virtual | ~AnimatBase () |
| Destroys the AnimatBase object.. More... | |
| virtual bool | AddItem (const std::string &strItemType, const std::string &strXml, bool bThrowError=true, bool bDoNotInit=false) |
| Adds a new object to this parent. More... | |
| virtual void | AfterResetSimulation () |
| Called after a simulation reset for some objects. More... | |
| virtual long | CalculateSnapshotByteSize () |
| Calculates the snapshot byte size. More... | |
| virtual void | Copy (CStdSerialize *lpSource) |
| virtual void | Enabled (bool bVal) |
| Tells whether this item is enabled or not. This is not actually used for all objects, only specific ones. I am putting it in the base class though to prevent numerous duplications. More... | |
| virtual bool | Enabled () |
| Tells whether this item is enabled or not. This is not actually used for all objects, only specific ones. I am putting it in the base class though to prevent numerous duplications. More... | |
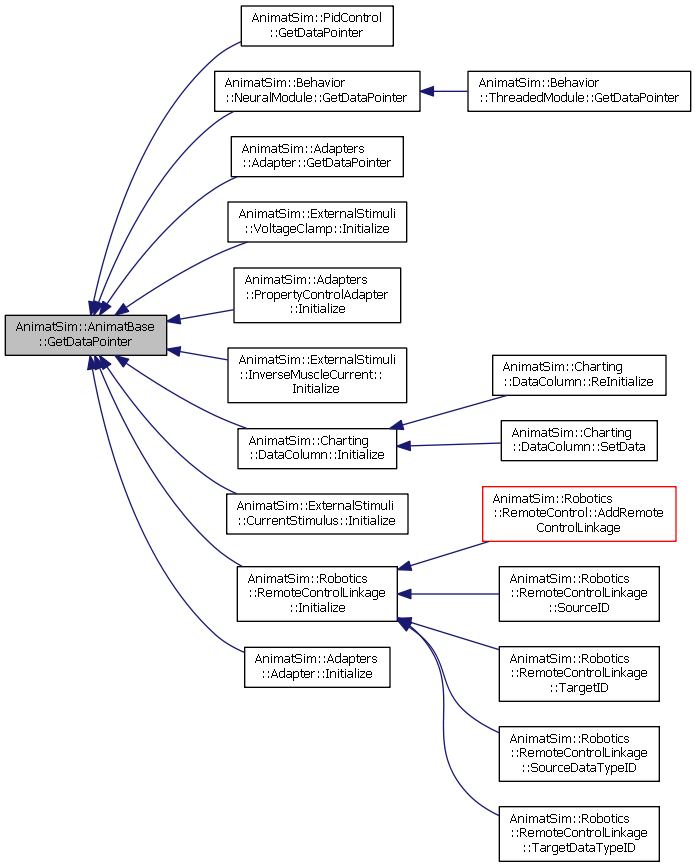
| virtual float * | GetDataPointer (const std::string &strDataType) |
| Returns a float pointer to a data item of interest in this object. More... | |
| virtual NeuralModule * | GetNeuralModule () |
| Gets the neural module. More... | |
| virtual Node * | GetNode () |
| Gets the node. More... | |
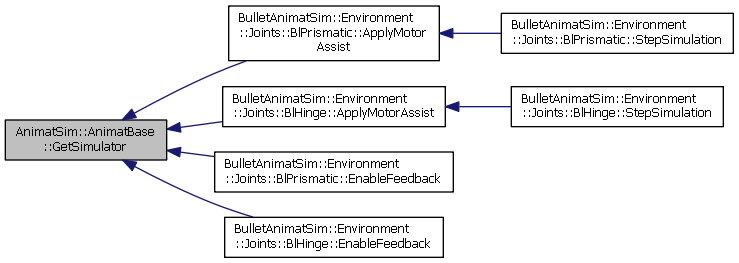
| virtual Simulator * | GetSimulator () |
| Gets the simulator pointer. More... | |
| virtual Structure * | GetStructure () |
| Gets the structure for this node. More... | |
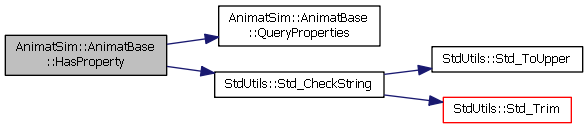
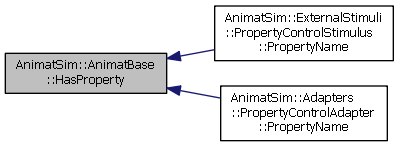
| virtual bool | HasProperty (const std::string &strName) |
| Queries this object if it has a property with the given name. More... | |
| virtual std::string | ID () |
| Gets the unique GUID ID of this object. More... | |
| virtual void | ID (std::string strValue) |
| Sets the unique GUID ID of the object. More... | |
| virtual void | Initialize () |
| Initializes this object. More... | |
| virtual void | Kill (bool bState=true) |
| Kills. More... | |
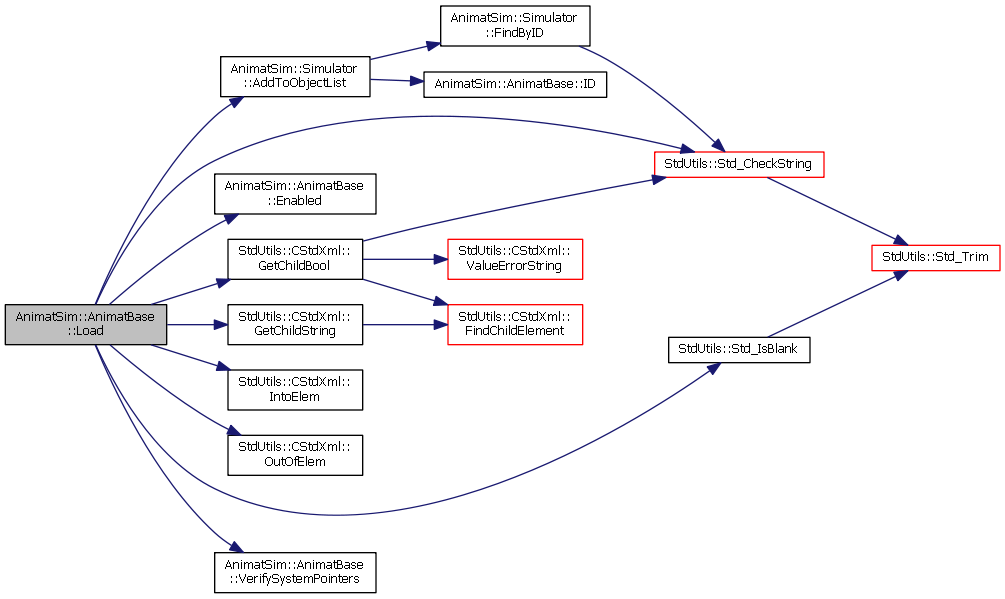
| virtual void | Load (StdUtils::CStdXml &oXml) |
| Loads the item using an XML data packet. More... | |
| virtual void | LoadKeyFrameSnapshot (byte *aryBytes, long &lIndex) |
| Loads a key frame snapshot. More... | |
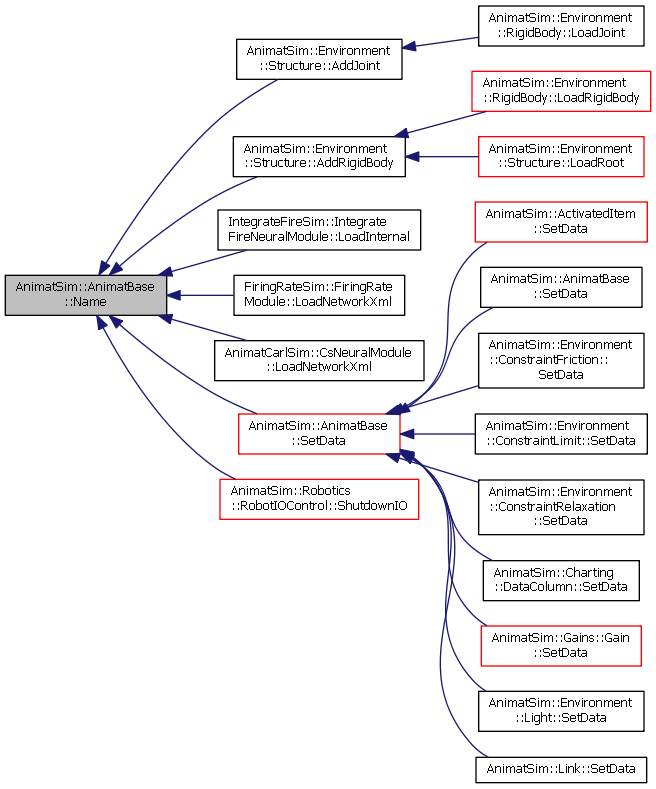
| virtual std::string | Name () |
| Gets the name of this object. More... | |
| virtual void | Name (std::string strValue) |
| Sets the name of the object. Blank is acceptable. More... | |
| virtual AnimatPropertyType | PropertyType (const std::string &strName) |
| virtual void | QueryProperties (CStdPtrArray< TypeProperty > &aryProperties) |
| Queries this object for a list of properties that can be changed using SetData. More... | |
| virtual void | ReInitialize () |
| Re-initialize this object. More... | |
| virtual bool | RemoveItem (const std::string &strItemType, const std::string &strID, bool bThrowError=true) |
| Removes a child item from this parent. More... | |
| virtual void | Reset () |
| Resets this object. More... | |
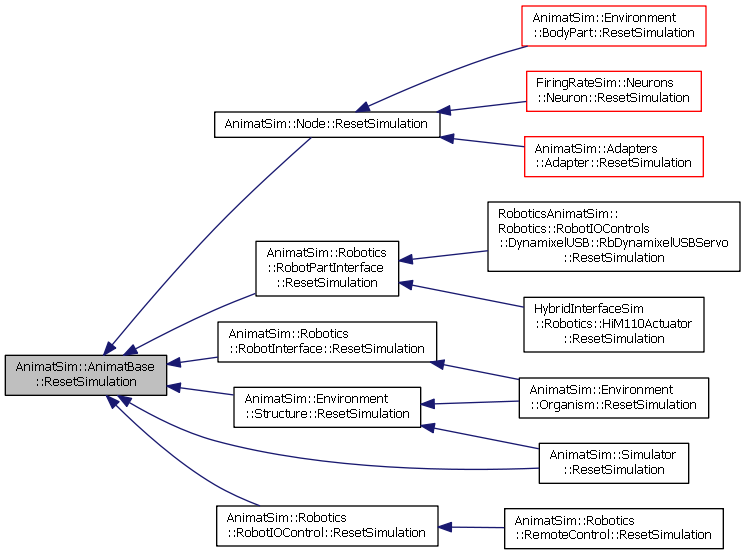
| virtual void | ResetSimulation () |
| Resets the simulation back to time 0. More... | |
| virtual void | RigidBodyAdded (std::string strID) |
| virtual void | RigidBodyRemoved (std::string strID) |
| virtual void | SaveKeyFrameSnapshot (byte *aryBytes, long &lIndex) |
| Saves a key frame snapshot. More... | |
| virtual bool | Selected () |
| Tells if this items is selected or not. More... | |
| virtual void | Selected (bool bValue, bool bSelectMultiple) |
| Selects this object. More... | |
| virtual bool | SetData (const std::string &strDataType, const std::string &strValue, bool bThrowError=true) |
| Set a variable based on a string data type name. More... | |
| virtual bool | SetData (const std::string &strDataType, const float fltValue, bool bThrowError=true) |
| Set a variable based on a string data type name. More... | |
| virtual bool | SetData (const std::string &strDataType, const long lValue, bool bThrowError=true) |
| Set a variable based on a string data type name. More... | |
| virtual void | SetSystemPointers (Simulator *lpSim, Structure *lpStructure, NeuralModule *lpModule, Node *lpNode, bool bVerify) |
| Sets the system pointers. More... | |
| virtual void | SimPausing () |
| Called just before the simulation pauses. More... | |
| virtual void | SimStarting () |
| Called just before the simulation starts. More... | |
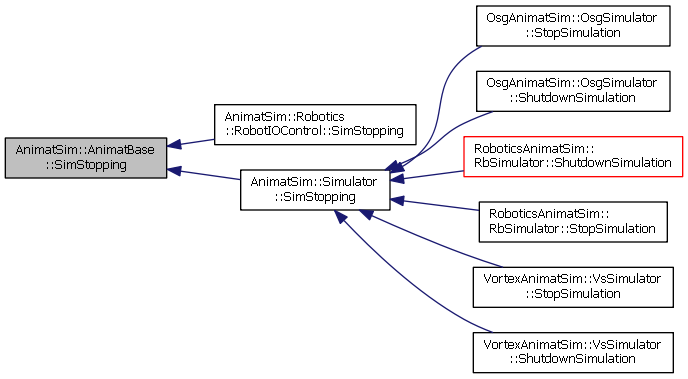
| virtual void | SimStopping () |
| Called just before the simulation stops. More... | |
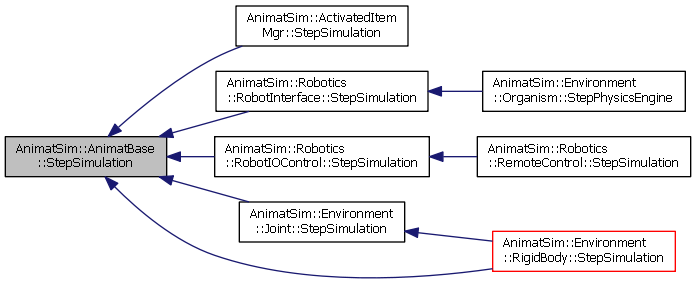
| virtual void | StepSimulation () |
| Step the simulation for this object. More... | |
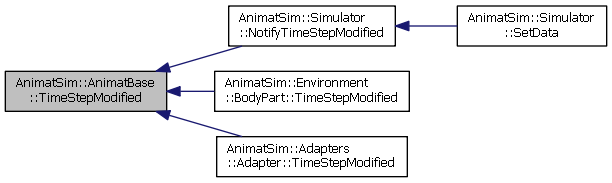
| virtual void | TimeStepModified () |
| Notification method that the time step modified has been modified. Objects should recalculate any slice times as needed. More... | |
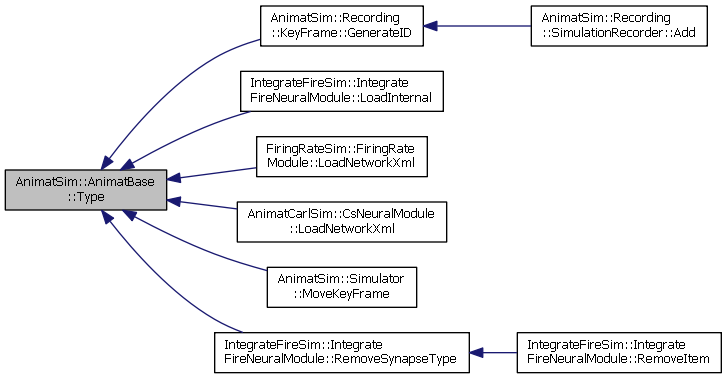
| virtual std::string | Type () |
| returns the string type name of this object. More... | |
| virtual void | Type (std::string strValue) |
| Sets the class type for this object. More... | |
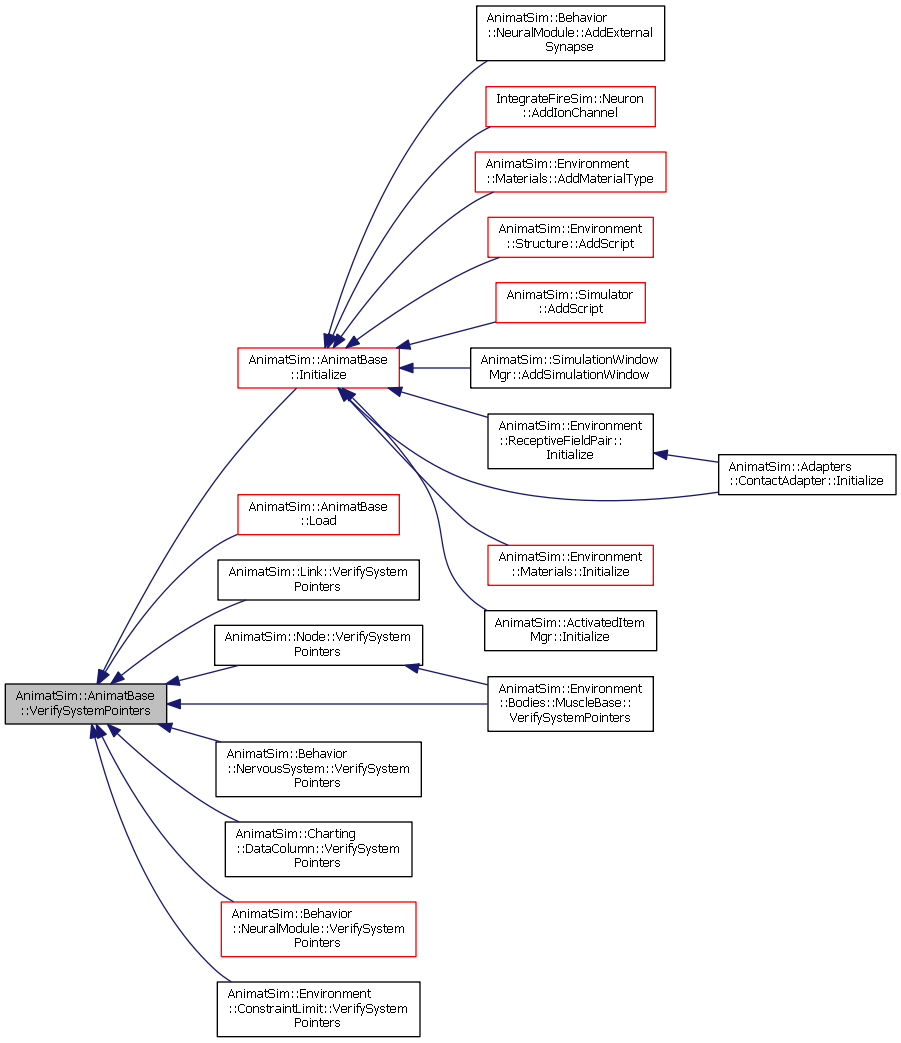
| virtual void | VerifySystemPointers () |
| Verify that system pointers have been set correctly. More... | |
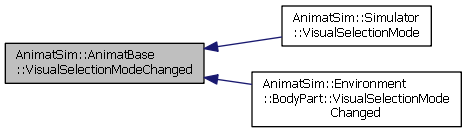
| virtual void | VisualSelectionModeChanged (int iNewMode) |
| Visual selection mode changed. More... | |
Protected Attributes | |
| bool | m_bEnabled |
| Tells if this item is enabled or not. If it is not enabled then it is not run. | |
| bool | m_bSelected |
| Tells whether the object is selected or not. | |
| AnimatSim::Behavior::NeuralModule * | m_lpModule |
| The pointer to this items parentNeuralModule. If this is not relevant for this object then this is NULL. | |
| Node * | m_lpNode |
| The pointer to this items parent Node. If this is not relevant for this object then this is NULL. | |
| Simulator * | m_lpSim |
| The pointer to a Simulation. | |
| AnimatSim::Environment::Structure * | m_lpStructure |
| The pointer to this items parent Structure. If this is not relevant for this object then this is NULL. | |
| std::string | m_strID |
| The unique Id for this object. | |
| std::string | m_strName |
| The name for this object. | |
| std::string | m_strType |
| The type for this object. Examples are Box, Plane, Neuron, etc.. | |
Animat base class.
This class contains the base variables and methods that are used by all of the other animat simulation objects. For example, it contains the unique ID string, type, name, etc. that is used for object creation and searching. It also has the base methods used to set data items and add/remove new items.
Definition at line 36 of file AnimatBase.h.
| AnimatSim::AnimatBase::AnimatBase | ( | ) |
Constructs an AnimatBase object.
Sets the ID to a default GUID value on creation. and selected is set to false by default.
Definition at line 58 of file AnimatBase.cpp.
References m_bEnabled, m_bSelected, m_lpModule, m_lpNode, m_lpSim, m_lpStructure, m_strID, and StdUtils::Std_CreateAppID().
Here is the call graph for this function:
|
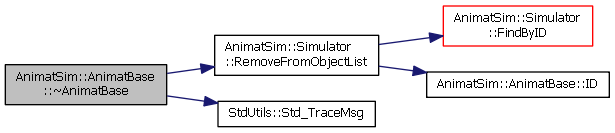
virtual |
Destroys the AnimatBase object..
When an AnimatBase object is destroyed a call is made to remove that object from the object list kept in the simulator. All objects are added to that list in their Load methods. The list allows you to easily find objects based on ID or name, and to call some of the base methods like AddItem and SetData.
Definition at line 80 of file AnimatBase.cpp.
References m_lpSim, AnimatSim::Simulator::RemoveFromObjectList(), and StdUtils::Std_TraceMsg().
Here is the call graph for this function:
|
virtual |
Adds a new object to this parent.
Generic method to add a new child item to this parent by specifying a string item type descriptor and an xml packet that can be used to load in the new object. The GUI uses this method to create new items that were added with the user interface. The item type lets the method determine what type of item is being created, like synapse, neuron, body part, etc.. It then gets the modulename, classname, and type from the xml and calls CreateObject to create the appropriate type of object. Then it passes in the xml packet to the new objects load method and does any needed initialization and adds it to the parent.
| strItemType | String descriptor of the type of item that is being created. |
| strXml | XML packet that is used to create and load the new item. |
| bThrowError | If true then throw an error if there is a problem, otherwise return false. |
Reimplemented in AnimatSim::Simulator, AnimatSim::Environment::RigidBody, IntegrateFireSim::Neuron, FiringRateSim::Neurons::Neuron, AnimatSim::Environment::Structure, OsgAnimatSim::Visualization::OsgLinearPath, VortexAnimatSim::Visualization::OsgLinearPath, IntegrateFireSim::IntegrateFireNeuralModule, AnimatSim::Charting::DataChart, AnimatSim::Robotics::RobotIOControl, AnimatCarlSim::CsNeuralModule, FiringRateSim::Synapses::Synapse, FiringRateSim::FiringRateModule, AnimatSim::Environment::ContactSensor, AnimatSim::Environment::Organism, AnimatSim::Robotics::RemoteControl, AnimatSim::Robotics::RobotInterface, AnimatSim::Behavior::PhysicsNeuralModule, AnimatSim::Environment::LightManager, AnimatSim::Adapters::ContactAdapter, OsgAnimatSim::Visualization::OsgScriptedSimulationWindow, VortexAnimatSim::Visualization::VsScriptedSimulationWindow, and AnimatSim::Environment::Materials.
Definition at line 513 of file AnimatBase.cpp.
References m_strID.
Referenced by AnimatSim::Simulator::AddItem().
Here is the caller graph for this function:
|
virtual |
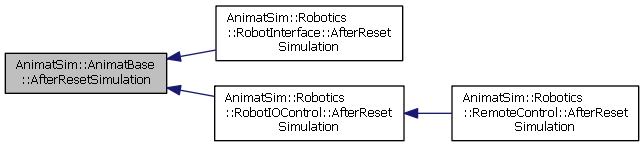
Called after a simulation reset for some objects.
This method is only used by some objects because they need to do some processing after the simulation has been reset.
Reimplemented in AnimatSim::Environment::RigidBody, AnimatSim::Environment::Bodies::LinearHillMuscle, AnimatSim::Environment::Joint, AnimatSim::Robotics::RobotIOControl, AnimatSim::Robotics::RemoteControl, AnimatSim::Robotics::RobotInterface, AnimatSim::Environment::Bodies::LineBase, VortexAnimatSim::Environment::Bodies::VsLinearHillMuscle, BulletAnimatSim::Environment::Bodies::BlLinearHillMuscle, and RoboticsAnimatSim::Environment::Bodies::RbLinearHillMuscle.
Definition at line 598 of file AnimatBase.cpp.
Referenced by AnimatSim::Robotics::RobotInterface::AfterResetSimulation(), and AnimatSim::Robotics::RobotIOControl::AfterResetSimulation().
Here is the caller graph for this function:
|
virtual |
Calculates the snapshot byte size.
Sometimes the user may want to capture a snapshot of the simulation at a given point in time, and then be able to go back to that specific point. To do this we grab a snapshot of all the data in the system, including the neural variables. We essentially serialize the data into a binary format for later re-use. This method calculates the number of bytes that will be required to store the entire object.
Reimplemented in AnimatSim::Simulator, FiringRateSim::Neurons::Neuron, AnimatSim::Environment::Structure, IntegrateFireSim::IntegrateFireNeuralModule, FiringRateSim::Neurons::RandomNeuron, FiringRateSim::Neurons::PacemakerNeuron, AnimatSim::Behavior::NervousSystem, FiringRateSim::FiringRateModule, AnimatSim::Behavior::PhysicsNeuralModule, and AnimatSim::Environment::Organism.
Definition at line 705 of file AnimatBase.cpp.
Referenced by AnimatSim::Behavior::NervousSystem::CalculateSnapshotByteSize().
Here is the caller graph for this function:
|
virtual |
Tells whether this item is enabled or not. This is not actually used for all objects, only specific ones. I am putting it in the base class though to prevent numerous duplications.
| bVal | Sets whether this item is enabled. |
Reimplemented in IntegrateFireSim::Neuron, AnimatSim::Environment::Bodies::LinearHillMuscle, IntegrateFireSim::IonChannel, AnimatSim::ActivatedItem, AnimatSim::Environment::Bodies::MuscleBase, AnimatSim::Environment::Joints::Hinge, AnimatSim::Environment::Light, AnimatSim::Environment::Joints::Prismatic, AnimatSim::Environment::Bodies::LineBase, VortexAnimatSim::Environment::VsLight, AnimatSim::Environment::ConstraintFriction, AnimatSim::Node, VortexAnimatSim::Environment::Bodies::VsSpring, AnimatSim::Environment::ConstraintRelaxation, OsgAnimatSim::Environment::OsgLight, AnimatSim::Environment::Odor, AnimatSim::Link, and AnimatSim::PidControl.
Definition at line 102 of file AnimatBase.cpp.
References m_bEnabled.
Referenced by AnimatSim::Environment::Organism::StepPhysicsEngine().
Here is the caller graph for this function:
|
virtual |
Tells whether this item is enabled or not. This is not actually used for all objects, only specific ones. I am putting it in the base class though to prevent numerous duplications.
Reimplemented in IntegrateFireSim::Neuron, IntegrateFireSim::IonChannel, AnimatSim::ActivatedItem, AnimatSim::Environment::Bodies::MuscleBase, AnimatSim::Environment::Light, AnimatSim::Environment::ConstraintFriction, AnimatSim::Node, AnimatSim::Environment::ConstraintRelaxation, AnimatSim::Environment::Odor, AnimatSim::Link, and AnimatSim::PidControl.
Definition at line 113 of file AnimatBase.cpp.
References m_bEnabled.
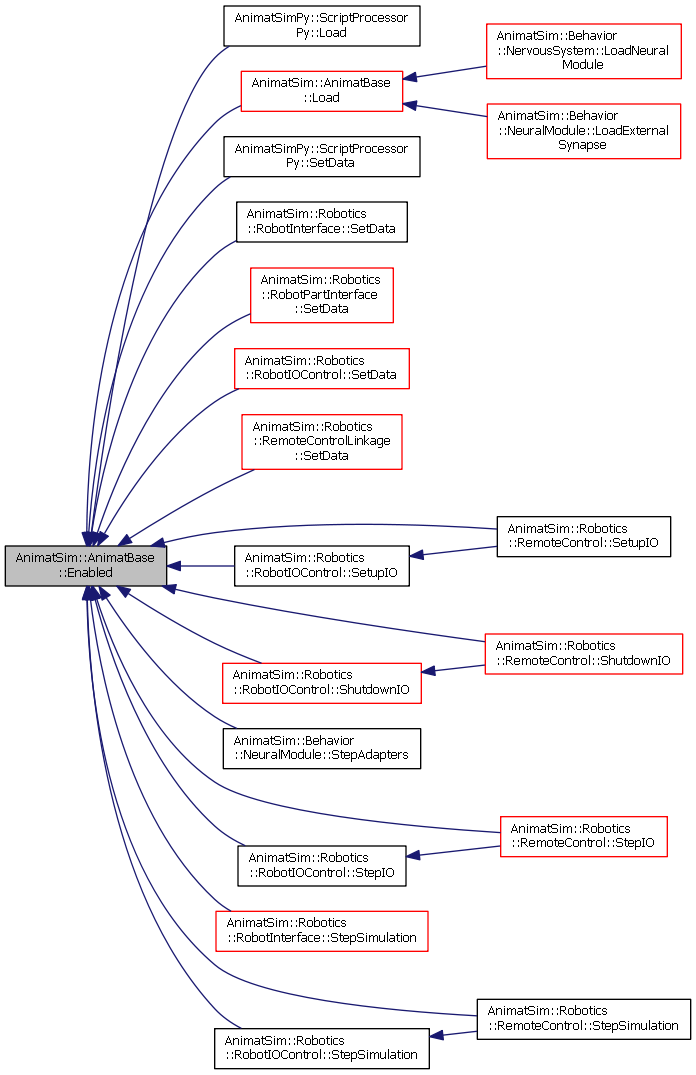
Referenced by AnimatSimPy::ScriptProcessorPy::Load(), Load(), AnimatSimPy::ScriptProcessorPy::SetData(), AnimatSim::Robotics::RobotInterface::SetData(), AnimatSim::Robotics::RobotPartInterface::SetData(), AnimatSim::Robotics::RobotIOControl::SetData(), AnimatSim::Robotics::RemoteControlLinkage::SetData(), AnimatSim::Robotics::RemoteControl::SetupIO(), AnimatSim::Robotics::RobotIOControl::SetupIO(), AnimatSim::Robotics::RemoteControl::ShutdownIO(), AnimatSim::Robotics::RobotIOControl::ShutdownIO(), AnimatSim::Behavior::NeuralModule::StepAdapters(), AnimatSim::Robotics::RemoteControl::StepIO(), AnimatSim::Robotics::RobotIOControl::StepIO(), AnimatSim::Robotics::RobotInterface::StepSimulation(), AnimatSim::Robotics::RemoteControl::StepSimulation(), and AnimatSim::Robotics::RobotIOControl::StepSimulation().
Here is the caller graph for this function:
|
virtual |
Returns a float pointer to a data item of interest in this object.
This is a generic method used to get a pointer to data variable of interest. It is used by a variety of systems in the simulation. The most prominent are the data charting and stimulus classes. Within this method we associate a variable with a string name. By passing in the name of the data type we are interested in we can recieve back a float pointer to that data type. We can use that to read or set the data item in other classes. For example, the data charting system gets the pointer and then each time it needs to log a data point it reads the value into an array.
| strDataType | name of the data item for which we are looking. |
| If | DataType is not found. |
Reimplemented in AnimatSim::Simulator, IntegrateFireSim::Neuron, FiringRateSim::Neurons::Neuron, AnimatCarlSim::CsNeuronGroup, AnimatSim::Adapters::Adapter, AnimatSim::Environment::Structure, AnimatSim::Environment::ConstraintLimit, AnimatSim::Behavior::NeuralModule, AnimatSim::ExternalStimuli::CurrentStimulus, AnimatSim::Robotics::RemoteControlLinkage, IntegrateFireSim::IonChannel, VortexAnimatSim::VsSimulator, AnimatCarlSim::CsSpikingCurrentSynapse, AnimatSim::Robotics::RobotIOControl, RoboticsAnimatSim::Robotics::RobotIOControls::DynamixelUSB::RbDynamixelUSBServo, FiringRateSim::Synapses::Synapse, AnimatSim::ExternalStimuli::ForceStimulus, AnimatSim::SimulationWindow, VortexAnimatSim::ExternalStimuli::VsForceStimulus, AnimatSim::Robotics::RobotPartInterface, AnimatSim::Behavior::ThreadedModule, FiringRateSim::Neurons::PacemakerNeuron, OsgAnimatSim::OsgSimulator, AnimatSim::Robotics::RemoteControl, AnimatSim::ExternalStimuli::InverseMuscleCurrent, RoboticsAnimatSim::Robotics::RobotIOControls::Firmata::RbFirmataHingeServo, AnimatSim::Robotics::PulsedLinkage, AnimatSim::ExternalStimuli::MotorStimulus, AnimatSim::ExternalStimuli::VoltageClamp, VortexAnimatSim::ExternalStimuli::VsMotorVelocityStimulus, AnimatSim::Robotics::RobotInterface, RoboticsAnimatSim::Robotics::RobotIOControls::Firmata::RbFirmataController, AnimatSim::ExternalStimuli::ExternalInputStimulus, OsgAnimatSim::Visualization::OsgSimulationWindow, RoboticsAnimatSim::Robotics::RobotIOControls::DynamixelUSB::RbDynamixelUSB, VortexAnimatSim::Visualization::VsSimulationWindow, FiringRateSim::Synapses::GatedSynapse, IntegrateFireSim::Synapses::Connexion, AnimatSim::PidControl, FiringRateSim::Synapses::ModulatedSynapse, HybridInterfaceSim::Robotics::HiSpike2, HybridInterfaceSim::Robotics::HiC884Controller, HybridInterfaceSim::Robotics::HiM110Actuator, and RoboticsAnimatSim::Robotics::RobotInterfaces::RbLANWirelessInterface.
Definition at line 340 of file AnimatBase.cpp.
References m_strID, and m_strName.
Referenced by AnimatSim::PidControl::GetDataPointer(), AnimatSim::Behavior::NeuralModule::GetDataPointer(), AnimatSim::Adapters::Adapter::GetDataPointer(), AnimatSim::ExternalStimuli::VoltageClamp::Initialize(), AnimatSim::Adapters::PropertyControlAdapter::Initialize(), AnimatSim::ExternalStimuli::InverseMuscleCurrent::Initialize(), AnimatSim::Charting::DataColumn::Initialize(), AnimatSim::ExternalStimuli::CurrentStimulus::Initialize(), AnimatSim::Robotics::RemoteControlLinkage::Initialize(), and AnimatSim::Adapters::Adapter::Initialize().
Here is the caller graph for this function:
|
virtual |
Gets the neural module.
Definition at line 144 of file AnimatBase.cpp.
References m_lpModule.
|
virtual |
Gets the node.
Definition at line 154 of file AnimatBase.cpp.
References m_lpNode.
|
virtual |
Gets the simulator pointer.
Reimplemented in AnimatSim::Behavior::NeuralModule.
Definition at line 123 of file AnimatBase.cpp.
References m_lpSim.
Referenced by BulletAnimatSim::Environment::Joints::BlPrismatic::ApplyMotorAssist(), BulletAnimatSim::Environment::Joints::BlHinge::ApplyMotorAssist(), BulletAnimatSim::Environment::Joints::BlPrismatic::EnableFeedback(), and BulletAnimatSim::Environment::Joints::BlHinge::EnableFeedback().
Here is the caller graph for this function:
|
virtual |
Gets the structure for this node.
Definition at line 133 of file AnimatBase.cpp.
References m_lpStructure.
|
virtual |
Queries this object if it has a property with the given name.
This method checks whether it has a property with the specified name.
| strName | Property name we are checking for. |
Definition at line 464 of file AnimatBase.cpp.
References m_strName, QueryProperties(), and StdUtils::Std_CheckString().
Referenced by AnimatSim::ExternalStimuli::PropertyControlStimulus::PropertyName(), and AnimatSim::Adapters::PropertyControlAdapter::PropertyName().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Gets the unique GUID ID of this object.
Definition at line 167 of file AnimatBase.cpp.
References m_strID.
Referenced by AnimatSim::Recording::SimulationRecorder::Add(), AnimatSim::ActivatedItemMgr::Add(), AnimatSim::Charting::DataChart::AddColumn(), AnimatSim::Environment::Structure::AddJoint(), AnimatSim::Simulator::AddKeyFrame(), AnimatSim::Environment::RigidBody::AddOdor(), AnimatSim::Environment::OdorType::AddOdorSource(), AnimatSim::Environment::Structure::AddRigidBody(), AnimatSim::Environment::RigidBody::AddRigidBody(), AnimatSim::Environment::Structure::AddRoot(), AnimatSim::Simulator::AddToObjectList(), IntegrateFireSim::Synapses::Connexion::Connexion(), AnimatSim::Simulator::EnableVideoPlayback(), AnimatSim::ActivatedItemMgr::Find(), AnimatSim::Robotics::RobotInterface::FindChildListPos(), AnimatSim::Environment::LightManager::FindChildListPos(), AnimatSim::Robotics::RobotIOControl::FindChildListPos(), AnimatSim::Environment::RigidBody::FindChildListPos(), AnimatSim::Environment::RigidBody::FindCollisionExclusionBody(), AnimatSim::Charting::DataChart::FindColumn(), IntegrateFireSim::IntegrateFireNeuralModule::FindElectricalListPos(), AnimatSim::Behavior::NeuralModule::FindExternalSynapseListPos(), IntegrateFireSim::Neuron::FindIonChannel(), IntegrateFireSim::Neuron::FindIonChannelListPos(), AnimatSim::Robotics::RemoteControl::FindLinkageChildListPos(), AnimatSim::ActivatedItemMgr::FindListPos(), AnimatCarlSim::CsNeuralModule::FindNeuronGroupListPos(), FiringRateSim::FiringRateModule::FindNeuronListPos(), IntegrateFireSim::IntegrateFireNeuralModule::FindNeuronListPos(), IntegrateFireSim::IntegrateFireNeuralModule::FindNonSpikingChemListPos(), AnimatSim::Environment::BodyPart::FindRobotPartListIndex(), IntegrateFireSim::IntegrateFireNeuralModule::FindSpikingChemListPos(), FiringRateSim::Synapses::Synapse::FindSynapseListPos(), AnimatCarlSim::CsNeuralModule::FindSynapseListPos(), IntegrateFireSim::IntegrateFireNeuralModule::FindSynapseListPos(), FiringRateSim::Neurons::Neuron::FindSynapseListPos(), AnimatSim::Environment::Materials::FindTypeListPos(), OsgAnimatSim::Visualization::OsgLinearPath::FindWaypointPos(), VortexAnimatSim::Visualization::OsgLinearPath::FindWaypointPos(), AnimatCarlSim::CsNeuronDataColumn::Initialize(), AnimatSim::Adapters::PropertyControlAdapter::Initialize(), AnimatSim::Adapters::Adapter::Initialize(), IntegrateFireSim::IntegrateFireNeuralModule::LoadInternal(), FiringRateSim::FiringRateModule::LoadNetworkXml(), AnimatCarlSim::CsNeuralModule::LoadNetworkXml(), AnimatSim::Simulator::MoveKeyFrame(), AnimatSim::Simulator::RemoveFromObjectList(), AnimatSim::Environment::Organism::RemoveRobotInterface(), AnimatSim::Environment::Structure::RemoveRoot(), AnimatSim::Environment::Structure::RemoveScript(), AnimatSim::Simulator::RemoveScript(), AnimatCarlSim::CsConnectionGenerator::VerifySystemPointers(), AnimatCarlSim::CsSynapseGroup::VerifySystemPointers(), FiringRateSim::Synapses::Synapse::VerifySystemPointers(), AnimatCarlSim::CsNeuronGroup::VerifySystemPointers(), and FiringRateSim::Neurons::Neuron::VerifySystemPointers().
|
virtual |
Sets the unique GUID ID of the object.
ID value must not be blank or exception Al_Err_lIDBlank will be thrown.
| strID | new ID string value. |
Definition at line 179 of file AnimatBase.cpp.
References m_strID, StdUtils::Std_CheckString(), and StdUtils::Std_IsBlank().
Here is the call graph for this function:
|
virtual |
Initializes this object.
After an object is loaded in it must be initialized before it can be used. This allows the object to retrieve any pointers or setup memory that it will need during execution. Each object is responsible for initializing any of its child objects, so you simply need to call this method on the containing class to init all child objects. It also calls VerifySystemPointers to make sure that the system pointers have been setup correctly.
Reimplemented in AnimatSim::Simulator, AnimatSim::Environment::MotorizedJoint, FiringRateSim::Neurons::Neuron, AnimatCarlSim::CsNeuronGroup, AnimatSim::Environment::Structure, IntegrateFireSim::IntegrateFireNeuralModule, AnimatSim::Adapters::Adapter, OsgAnimatSim::Visualization::OsgLinearPath, VortexAnimatSim::Visualization::OsgLinearPath, AnimatSim::Behavior::NeuralModule, AnimatSim::Robotics::RemoteControlLinkage, VortexAnimatSim::Environment::VsMaterialType, AnimatSim::Charting::DataChart, RoboticsAnimatSim::Robotics::RobotIOControls::Firmata::RbFirmataDynamixelServo, AnimatSim::ExternalStimuli::CurrentStimulus, FiringRateSim::Synapses::Synapse, AnimatSim::Environment::Joint, AnimatSim::Robotics::RobotIOControl, AnimatCarlSim::CsSpikingCurrentSynapse, AnimatSim::ActivatedItem, RoboticsAnimatSim::Robotics::RobotIOControls::DynamixelUSB::RbDynamixelUSBServo, AnimatCarlSim::CsSynapseGroup, AnimatCarlSim::CsNeuralModule, AnimatSim::Charting::DataColumn, AnimatSim::Robotics::RobotPartInterface, AnimatSim::ExternalStimuli::ForceStimulus, VortexAnimatSim::ExternalStimuli::VsForceStimulus, AnimatSim::Environment::BodyPart, RoboticsAnimatSim::Robotics::RobotIOControls::RbXBeeCommander, AnimatSim::Behavior::NervousSystem, RoboticsAnimatSim::Robotics::RobotIOControls::RbAnimatSerial, AnimatSim::Environment::Bodies::Mouth, AnimatSim::Environment::Bodies::Sensor, AnimatSim::ExternalStimuli::InverseMuscleCurrent, AnimatSim::Robotics::RemoteControl, RoboticsAnimatSim::Robotics::RobotIOControls::Firmata::RbFirmataHingeServo, AnimatSim::Environment::Organism, AnimatSim::Adapters::PropertyControlAdapter, AnimatSim::ExternalStimuli::PropertyControlStimulus, AnimatSim::SimulationWindowMgr, AnimatSim::Environment::LightManager, AnimatSim::Robotics::RobotInterface, AnimatSimPy::ScriptProcessorPy, AnimatSim::Adapters::ContactAdapter, FiringRateSim::FiringRateModule, AnimatSim::ExternalStimuli::MotorStimulus, AnimatSim::ExternalStimuli::VoltageClamp, BulletAnimatSim::Environment::BlConstraintRelaxation, VortexAnimatSim::ExternalStimuli::VsMotorVelocityStimulus, AnimatCarlSim::CsAdapter, AnimatSim::ActivatedItemMgr, OsgAnimatSim::Visualization::OsgScriptedSimulationWindow, VortexAnimatSim::Visualization::VsScriptedSimulationWindow, AnimatSim::Behavior::PhysicsNeuralModule, AnimatCarlSim::CsNeuronDataColumn, AnimatCarlSim::CsSpikeGeneratorGroup, FiringRateSim::Synapses::ModulateNeuronPropSynapse, OsgAnimatSim::Visualization::OsgSimulationWindow, VortexAnimatSim::Visualization::VsSimulationWindow, AnimatSim::ExternalStimuli::ExternalInputStimulus, BulletAnimatSim::Environment::BlMaterialType, RoboticsAnimatSim::Environment::RbMaterialType, AnimatSim::Charting::FileChart, AnimatSim::Environment::Materials, AnimatSim::Charting::MemoryChart, AnimatSim::Environment::ReceptiveFieldPair, AnimatSim::ExternalStimuli::EnablerStimulus, HybridInterfaceSim::Robotics::HiSpike2, HybridInterfaceSim::Robotics::HiC884Controller, HybridInterfaceSim::Robotics::HiM110Actuator, AnimatSim::Charting::ArrayChart, RoboticsAnimatSim::Robotics::RobotInterfaces::RbLANWirelessInterface, RoboticsAnimatSim::Robotics::RobotIOControls::Firmata::RbFirmataPrismaticServo, OsgAnimatSim::Visualization::OsgSimulationWindowMgr, VortexAnimatSim::Visualization::VsSimulationWindowMgr, AnimatSim::Hud, VortexAnimatSim::Environment::VsConstraintRelaxation, OsgAnimatSim::Visualization::OsgHud, VortexAnimatSim::Visualization::VsHud, BulletAnimatSim::Environment::BlConstraintFriction, RoboticsAnimatSim::Environment::RbConstraintFriction, RoboticsAnimatSim::Environment::RbConstraintRelaxation, and VortexAnimatSim::Environment::VsConstraintFriction.
Definition at line 573 of file AnimatBase.cpp.
References VerifySystemPointers().
Referenced by AnimatSim::Behavior::NeuralModule::AddExternalSynapse(), IntegrateFireSim::Neuron::AddIonChannel(), AnimatSim::Environment::Materials::AddMaterialType(), AnimatSim::Environment::Structure::AddScript(), AnimatSim::Simulator::AddScript(), AnimatSim::SimulationWindowMgr::AddSimulationWindow(), AnimatSim::Environment::ReceptiveFieldPair::Initialize(), AnimatSim::Environment::Materials::Initialize(), AnimatSim::ActivatedItemMgr::Initialize(), AnimatSim::Adapters::ContactAdapter::Initialize(), AnimatSim::Robotics::RobotInterface::Initialize(), AnimatSim::SimulationWindowMgr::Initialize(), AnimatSim::Adapters::PropertyControlAdapter::Initialize(), AnimatSim::Behavior::NervousSystem::Initialize(), AnimatSim::Environment::BodyPart::Initialize(), AnimatSim::Charting::DataColumn::Initialize(), AnimatSim::ActivatedItem::Initialize(), AnimatSim::Environment::Joint::Initialize(), AnimatSim::Adapters::Adapter::Initialize(), AnimatSim::Environment::Structure::Initialize(), AnimatSim::Simulator::InitializeStructures(), and SetData().
Here is the call graph for this function:
|
virtual |
Kills.
Called to kill the organism, nervous system, neurons, and body parts. All neural items are disabled to prevent any further neural activity, and all joints are disabled to allow free rotation, and all biomechancical components are disabled so they can no longer produce forces. This method is only relevant to these types of objects, but I am putting the definition in the base class because a variety of different types of classes all need this method and I want it consolidated. Those classes that do not need it do not have to call it or do anything when it is called.
| bState | true to state. |
Reimplemented in AnimatSim::Environment::RigidBody, AnimatSim::Environment::Structure, IntegrateFireSim::IntegrateFireNeuralModule, AnimatCarlSim::CsNeuralModule, AnimatSim::Environment::Organism, AnimatSimPy::ScriptProcessorPy, FiringRateSim::FiringRateModule, AnimatSim::Behavior::NervousSystem, AnimatSim::Behavior::PhysicsNeuralModule, and AnimatSim::Node.
Definition at line 627 of file AnimatBase.cpp.
Referenced by AnimatSim::Behavior::NervousSystem::Kill(), and AnimatSim::Environment::Structure::Kill().
Here is the caller graph for this function:
|
virtual |
Loads the item using an XML data packet.
This method is responsible for loading the structure from a XMl configuration file. You should call this method even in your overriden function becuase it loads all of the base properties for this object like ID and Name. It also includes this object in the simulators AddToObjectList so that the simulator knows about this object when you do a FindObject call. If you do not call this base method then it is up to you to add your item to the simulators list of objects.
| [in,out] | oXml | The CStdXml xml data packet to load. |
Reimplemented in AnimatSim::Simulator, OsgAnimatSim::Visualization::OsgLinearPath, VortexAnimatSim::Visualization::OsgLinearPath, RoboticsAnimatSim::Robotics::RobotIOControls::RbXBeeCommander, OsgAnimatSim::Visualization::ControlPoint, VortexAnimatSim::Visualization::ControlPoint, RoboticsAnimatSim::Robotics::RobotIOControls::RbAnimatSerial, AnimatSimPy::ScriptProcessorPy, RoboticsAnimatSim::Robotics::RobotIOControls::Firmata::RbFirmataController, RoboticsAnimatSim::Robotics::RobotIOControls::DynamixelUSB::RbDynamixelUSB, HybridInterfaceSim::Robotics::HiSpike2, HybridInterfaceSim::Robotics::HiM110Actuator, HybridInterfaceSim::Robotics::HiC884Controller, and RoboticsAnimatSim::Robotics::RobotInterfaces::RbLANWirelessInterface.
Definition at line 771 of file AnimatBase.cpp.
References AnimatSim::Simulator::AddToObjectList(), Enabled(), StdUtils::CStdXml::GetChildBool(), StdUtils::CStdXml::GetChildString(), StdUtils::CStdXml::IntoElem(), m_bEnabled, m_lpSim, m_strID, m_strName, m_strType, StdUtils::CStdXml::OutOfElem(), StdUtils::Std_CheckString(), StdUtils::Std_IsBlank(), and VerifySystemPointers().
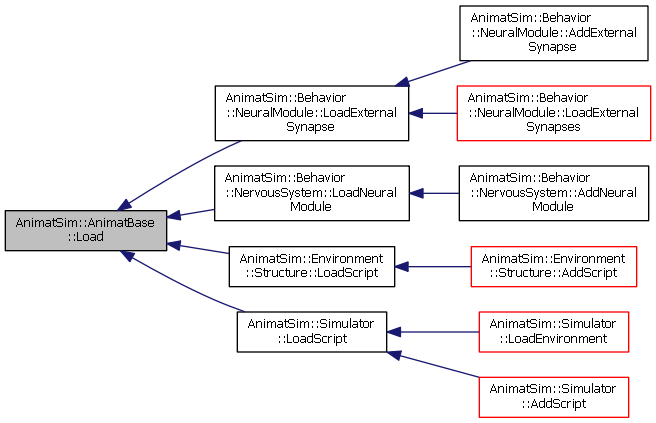
Referenced by AnimatSim::Behavior::NeuralModule::LoadExternalSynapse(), AnimatSim::Behavior::NervousSystem::LoadNeuralModule(), AnimatSim::Environment::Structure::LoadScript(), and AnimatSim::Simulator::LoadScript().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Loads a key frame snapshot.
Sometimes the user may want to capture a snapshot of the simulation at a given point in time, and then be able to go back to that specific point. To do this we grab a snapshot of all the data in the system, including the neural variables. We essentially serialize the data into a binary format for later re-use. This method goes through each module and loads its data from the byte array.
| [in,out] | aryBytes | The array of bytes where the data is being stored. |
| [in,out] | lIndex | Current zero-based index of the read position in the array. |
Reimplemented in AnimatSim::Simulator, FiringRateSim::Neurons::Neuron, AnimatSim::Environment::Structure, IntegrateFireSim::IntegrateFireNeuralModule, FiringRateSim::Neurons::RandomNeuron, FiringRateSim::Neurons::PacemakerNeuron, AnimatSim::Behavior::NervousSystem, FiringRateSim::FiringRateModule, AnimatSim::Behavior::PhysicsNeuralModule, and AnimatSim::Environment::Organism.
Definition at line 739 of file AnimatBase.cpp.
Referenced by AnimatSim::Behavior::NervousSystem::LoadKeyFrameSnapshot().
Here is the caller graph for this function:
|
virtual |
Gets the name of this object.
Definition at line 195 of file AnimatBase.cpp.
References m_strName.
Referenced by AnimatSim::Environment::Structure::AddJoint(), AnimatSim::Environment::Structure::AddRigidBody(), IntegrateFireSim::IntegrateFireNeuralModule::LoadInternal(), FiringRateSim::FiringRateModule::LoadNetworkXml(), AnimatCarlSim::CsNeuralModule::LoadNetworkXml(), SetData(), and AnimatSim::Robotics::RobotIOControl::ShutdownIO().
Here is the caller graph for this function:
|
virtual |
Sets the name of the object. Blank is acceptable.
| strValue | The name value. |
Reimplemented in AnimatSim::Charting::DataColumn.
Definition at line 205 of file AnimatBase.cpp.
References m_strName.
|
virtual |
Queries this object for a list of properties that can be changed using SetData.
The method provides a list of the properties that can be set using the SetData method. It gives the property name and the type of data that should be passed to it. Valid date types are Boolean, Float, Integer, and Xml.
| aryNames | Array list of the property names. |
| strTypes | Array list of the type that is associated with the cooresponding name in the list. |
Reimplemented in AnimatSim::Simulator, AnimatSim::Adapters::Adapter, AnimatSim::Environment::Structure, AnimatSim::Environment::ConstraintLimit, AnimatSim::ExternalStimuli::CurrentStimulus, AnimatSim::Robotics::RemoteControlLinkage, AnimatSim::Charting::DataChart, AnimatSim::Gains::Gain, AnimatSim::Robotics::RobotIOControl, AnimatSim::Charting::DataColumn, AnimatSim::Environment::Light, AnimatSim::ExternalStimuli::ForceStimulus, AnimatSim::SimulationWindow, AnimatSim::Robotics::RobotPartInterface, AnimatSim::Behavior::ThreadedModule, AnimatSim::Node, AnimatSim::Gains::LengthTensionGain, AnimatSim::ExternalStimuli::PropertyControlStimulus, AnimatSim::Robotics::RemoteControl, AnimatSim::Adapters::PropertyControlAdapter, AnimatSim::ExternalStimuli::InverseMuscleCurrent, AnimatSim::Robotics::PulsedLinkage, AnimatSim::ExternalStimuli::MotorStimulus, AnimatSim::Environment::ConstraintFriction, AnimatSim::ExternalStimuli::VoltageClamp, AnimatSim::Robotics::RobotInterface, AnimatSim::Gains::BellGain, AnimatSim::Behavior::PhysicsNeuralModule, AnimatSim::Gains::PolynomialGain, AnimatSim::Gains::SigmoidGain, AnimatSim::Environment::Odor, AnimatSim::ExternalStimuli::ExternalInputStimulus, AnimatSim::Environment::ConstraintRelaxation, AnimatSim::Environment::OdorType, AnimatSim::Gains::EquationGain, AnimatSim::ExternalStimuli::EnablerStimulus, AnimatSim::Link, AnimatSim::ExternalStimuli::ExternalStimulus, AnimatSim::PidControl, and AnimatSim::Robotics::PassThroughLinkage.
Definition at line 447 of file AnimatBase.cpp.
Referenced by HasProperty(), AnimatSim::PidControl::QueryProperties(), AnimatSim::ExternalStimuli::ExternalStimulus::QueryProperties(), AnimatSim::Link::QueryProperties(), AnimatSim::Environment::OdorType::QueryProperties(), AnimatSim::Environment::ConstraintRelaxation::QueryProperties(), AnimatSim::Environment::Odor::QueryProperties(), AnimatSim::Behavior::PhysicsNeuralModule::QueryProperties(), AnimatSim::Robotics::RobotInterface::QueryProperties(), AnimatSim::Environment::ConstraintFriction::QueryProperties(), AnimatSim::Node::QueryProperties(), AnimatSim::Behavior::ThreadedModule::QueryProperties(), AnimatSim::Robotics::RobotPartInterface::QueryProperties(), AnimatSim::SimulationWindow::QueryProperties(), AnimatSim::Environment::Light::QueryProperties(), AnimatSim::Charting::DataColumn::QueryProperties(), AnimatSim::Robotics::RobotIOControl::QueryProperties(), AnimatSim::Gains::Gain::QueryProperties(), AnimatSim::Charting::DataChart::QueryProperties(), AnimatSim::Robotics::RemoteControlLinkage::QueryProperties(), AnimatSim::Environment::ConstraintLimit::QueryProperties(), AnimatSim::Environment::Structure::QueryProperties(), and AnimatSim::Simulator::QueryProperties().
|
virtual |
Re-initialize this object.
Some objects like data charts need to be re-initialized some times. An example of when that would be needed is when the simulation is re-started.
Reimplemented in AnimatSim::Charting::DataChart, AnimatSim::ActivatedItem, AnimatSim::Charting::DataColumn, AnimatSim::ActivatedItemMgr, and AnimatSim::Charting::ArrayChart.
Definition at line 609 of file AnimatBase.cpp.
|
virtual |
Removes a child item from this parent.
This is a generic method that is used to delete a child object from this parent. The GUI uses this method to remove objects from the simulation that have been deleted in the UI. The item type lets the method determine what type of item is being deleted, like synapse, neuron, body part, etc.. The ID is then used to delete that specific item.
| strItemType | String descriptor of the type of item that is being created. |
| strID | Unique ID of the item that will be removed. |
| bThrowError | If true then throw an error if there is a problem, otherwise return false. |
Reimplemented in AnimatSim::Simulator, AnimatSim::Environment::RigidBody, IntegrateFireSim::Neuron, FiringRateSim::Neurons::Neuron, AnimatSim::Environment::Structure, OsgAnimatSim::Visualization::OsgLinearPath, VortexAnimatSim::Visualization::OsgLinearPath, IntegrateFireSim::IntegrateFireNeuralModule, AnimatSim::Charting::DataChart, AnimatSim::Robotics::RobotIOControl, AnimatCarlSim::CsNeuralModule, FiringRateSim::Synapses::Synapse, FiringRateSim::FiringRateModule, AnimatSim::Environment::ContactSensor, AnimatSim::Environment::Organism, AnimatSim::Robotics::RemoteControl, AnimatSim::Robotics::RobotInterface, AnimatSim::Behavior::PhysicsNeuralModule, AnimatSim::Environment::LightManager, AnimatSim::Adapters::ContactAdapter, OsgAnimatSim::Visualization::OsgScriptedSimulationWindow, VortexAnimatSim::Visualization::VsScriptedSimulationWindow, and AnimatSim::Environment::Materials.
Definition at line 538 of file AnimatBase.cpp.
References m_strID.
|
virtual |
Resets this object.
Call this method to reset all data for this object back to its pre-loaded state.
Reimplemented in AnimatSim::Simulator, VortexAnimatSim::VsSimulator, OsgAnimatSim::OsgSimulator, RoboticsAnimatSim::RbSimulator, AnimatSim::ActivatedItemMgr, AnimatSim::Environment::Materials, and AnimatSim::Hud.
Definition at line 559 of file AnimatBase.cpp.
Referenced by AnimatSim::Simulator::Reset(), and AnimatSim::Environment::MotorizedJoint::ResetSimulation().
Here is the caller graph for this function:
|
virtual |
Resets the simulation back to time 0.
This method calls the ResetSimulation method on all subitems in order to reset the simulation back to the beginning.
Reimplemented in AnimatSim::Simulator, AnimatSim::Environment::RigidBody, IntegrateFireSim::Neuron, AnimatSim::Environment::MotorizedJoint, FiringRateSim::Neurons::Neuron, AnimatCarlSim::CsNeuronGroup, IntegrateFireSim::IntegrateFireNeuralModule, AnimatSim::Adapters::Adapter, AnimatSim::Behavior::NeuralModule, OsgAnimatSim::Visualization::OsgLinearPath, VortexAnimatSim::Visualization::OsgLinearPath, AnimatSim::Environment::Bodies::LinearHillMuscle, AnimatSim::Environment::Structure, AnimatSim::Environment::Bodies::Spring, AnimatSim::Robotics::RemoteControlLinkage, AnimatSim::Charting::DataChart, IntegrateFireSim::IonChannel, AnimatSim::ExternalStimuli::CurrentStimulus, AnimatSim::Environment::Joint, AnimatSim::Robotics::RobotIOControl, FiringRateSim::Synapses::Synapse, AnimatCarlSim::CsSpikingCurrentSynapse, AnimatSim::ActivatedItem, VortexAnimatSim::VsSimulator, RoboticsAnimatSim::Robotics::RobotIOControls::DynamixelUSB::RbDynamixelUSBServo, AnimatCarlSim::CsNeuralModule, FiringRateSim::Neurons::RandomNeuron, AnimatSim::Environment::Bodies::MuscleBase, AnimatSim::Robotics::RobotPartInterface, AnimatSim::Environment::Bodies::LinearHillStretchReceptor, AnimatSim::ExternalStimuli::ForceStimulus, AnimatSim::Environment::Bodies::Stomach, VortexAnimatSim::ExternalStimuli::VsForceStimulus, AnimatSim::Environment::BodyPart, AnimatSim::Environment::Bodies::Mouth, FiringRateSim::Neurons::PacemakerNeuron, AnimatSim::Environment::Joints::Hinge, AnimatSim::ExternalStimuli::InverseMuscleCurrent, AnimatSim::Robotics::RemoteControl, BulletAnimatSim::Environment::Joints::BlHinge, AnimatSim::SimulationWindowMgr, AnimatSim::Node, AnimatSim::Environment::Organism, AnimatSim::Robotics::PulsedLinkage, AnimatSim::Adapters::PropertyControlAdapter, RoboticsAnimatSim::RbSimulator, AnimatSim::Robotics::RobotInterface, FiringRateSim::Neurons::BistableNeuron, AnimatSimPy::ScriptProcessorPy, FiringRateSim::FiringRateModule, AnimatSim::ExternalStimuli::MotorStimulus, AnimatSim::ExternalStimuli::VoltageClamp, BulletAnimatSim::Environment::Joints::BlPrismatic, RoboticsAnimatSim::Robotics::RobotIOControls::Firmata::RbFirmataController, OsgAnimatSim::Environment::OsgLight, VortexAnimatSim::ExternalStimuli::VsMotorVelocityStimulus, VortexAnimatSim::Environment::VsLight, AnimatCarlSim::CsAdapter, AnimatSim::ActivatedItemMgr, OsgAnimatSim::Visualization::OsgScriptedSimulationWindow, VortexAnimatSim::Visualization::VsScriptedSimulationWindow, AnimatSim::Behavior::PhysicsNeuralModule, AnimatSim::Behavior::NervousSystem, RoboticsAnimatSim::Environment::Joints::RbHinge, VortexAnimatSim::Environment::Bodies::VsSpring, FiringRateSim::Synapses::ModulateNeuronPropSynapse, AnimatSim::Environment::Bodies::OdorSensor, VortexAnimatSim::Environment::VsStructure, AnimatSim::Charting::FileChart, OsgAnimatSim::Environment::OsgStructure, VortexAnimatSim::Environment::VsOrganism, HybridInterfaceSim::Robotics::HiSpike2, RoboticsAnimatSim::Environment::Joints::RbPrismatic, OsgAnimatSim::Environment::OsgOrganism, RoboticsAnimatSim::Environment::RbStructure, HybridInterfaceSim::Robotics::HiM110Actuator, IntegrateFireSim::Synapses::Connexion, RoboticsAnimatSim::Environment::RbOrganism, AnimatSim::PidControl, VortexAnimatSim::Environment::Bodies::VsLinearHillMuscle, VortexAnimatSim::Environment::Bodies::VsLinearHillStretchReceptor, AnimatSim::Hud, OsgAnimatSim::Visualization::OsgHudText, VortexAnimatSim::Visualization::VsHudText, BulletAnimatSim::Environment::Bodies::BlLinearHillMuscle, RoboticsAnimatSim::Environment::Bodies::RbLinearHillMuscle, BulletAnimatSim::Environment::Bodies::BlLinearHillStretchReceptor, RoboticsAnimatSim::Environment::Bodies::RbLinearHillStretchReceptor, BulletAnimatSim::Environment::Bodies::BlSpring, and RoboticsAnimatSim::Environment::Bodies::RbSpring.
Definition at line 587 of file AnimatBase.cpp.
Referenced by AnimatSim::Robotics::RobotInterface::ResetSimulation(), AnimatSim::Node::ResetSimulation(), AnimatSim::Robotics::RobotPartInterface::ResetSimulation(), AnimatSim::Robotics::RobotIOControl::ResetSimulation(), AnimatSim::Environment::Structure::ResetSimulation(), and AnimatSim::Simulator::ResetSimulation().
Here is the caller graph for this function:
|
virtual |
Saves a key frame snapshot.
Sometimes the user may want to capture a snapshot of the simulation at a given point in time, and then be able to go back to that specific point. To do this we grab a snapshot of all the data in the system, including the neural variables. We essentially serialize the data into a binary format for later re-use. This method goes through each module and saves its data into the byte array.
| [in,out] | aryBytes | The array of bytes where the data is being stored. |
| [in,out] | lIndex | Current zero-based index of the write position in the array. |
Reimplemented in AnimatSim::Simulator, FiringRateSim::Neurons::Neuron, AnimatSim::Environment::Structure, IntegrateFireSim::IntegrateFireNeuralModule, FiringRateSim::Neurons::RandomNeuron, FiringRateSim::Neurons::PacemakerNeuron, AnimatSim::Behavior::NervousSystem, FiringRateSim::FiringRateModule, AnimatSim::Behavior::PhysicsNeuralModule, and AnimatSim::Environment::Organism.
Definition at line 722 of file AnimatBase.cpp.
Referenced by AnimatSim::Behavior::NervousSystem::SaveKeyFrameSnapshot().
Here is the caller graph for this function:
|
virtual |
Tells if this items is selected or not.
Body part items can be selected in the simulation by clicking on them while the simulation is in the correct mode. When selected the draggers are shown for manipulating the part. In the GUI parts can be selected by clicking on them in teh project workspace. Whenever this happens the selected variable is set so we know that the part is selected. Also, if we selected it in the simulation, then when applicable events are raised back up to the GUI to let it know that a part has been selected.
Definition at line 248 of file AnimatBase.cpp.
References m_bSelected.
Referenced by AnimatSim::Environment::Light::Selected(), and AnimatSim::Environment::Structure::Selected().
Here is the caller graph for this function:
|
virtual |
Selects this object.
Selects or deselects this object. If selectmultiple is true and bValue is true then it will try and add this item to a group of selected items. If selectmultiple is false then the currently selected item will be deselected and this one will be selected. All of this selection logic is actually taking place in the GUI. All the simulation does is have this variable that keeps track of whether THIS item is selected or not. Determining if it should be part of a group or not is done in the GUI project workspace.
| bValue | true to select, false to deselect. |
| bSelectMultiple | If true then this items is added as part of a group. If false then it is removed from a group. |
Reimplemented in AnimatSim::Environment::Structure, and AnimatSim::Environment::Light.
Definition at line 267 of file AnimatBase.cpp.
References m_bSelected.
|
virtual |
Set a variable based on a string data type name.
This is a generic method that can be used to set any variable in an AnimatBase object by specifying the name of the variable and a string representation of that data. The GUI uses this method to set data into variables in the simulation when the user changes them in the UI. The value string can be as simple as a float or int, or as complex as an xml packet. It is the developers responsibilty to know what type of data is needed and to process it accordingly.
| strDataType | string name of the data type to set. |
| strValue | The string value of the data. It is up to the developer to determine what this should be. For example, in most cases it is simply a float and you just have to convert it to a float and make the appropriate mutator method call. However, it can be any type of string, including an entire xml packet. It is the developers responsibility to know how to set and process the data as required. |
| bThrowError | true to throw error if there is a problem. If false then it will not return an error, just return false. |
Reimplemented in AnimatSim::Simulator, IntegrateFireSim::Neuron, FiringRateSim::Neurons::Neuron, AnimatCarlSim::CsNeuronGroup, AnimatSim::Adapters::Adapter, AnimatSim::Environment::Structure, AnimatSim::Environment::ConstraintLimit, OsgAnimatSim::Visualization::OsgLinearPath, VortexAnimatSim::Visualization::OsgLinearPath, IntegrateFireSim::IntegrateFireNeuralModule, VortexAnimatSim::Environment::VsMaterialType, AnimatSim::ExternalStimuli::CurrentStimulus, AnimatSim::Robotics::RemoteControlLinkage, AnimatSim::Charting::DataChart, RoboticsAnimatSim::Robotics::RobotIOControls::Firmata::RbFirmataDynamixelServo, IntegrateFireSim::IonChannel, AnimatSim::ActivatedItem, AnimatSim::Gains::Gain, AnimatCarlSim::CsSpikingCurrentSynapse, AnimatSim::Robotics::RobotIOControl, RoboticsAnimatSim::Robotics::RobotIOControls::DynamixelUSB::RbDynamixelUSBServo, AnimatCarlSim::CsNeuralModule, AnimatSim::Charting::DataColumn, AnimatSim::Environment::Light, FiringRateSim::Synapses::Synapse, AnimatCarlSim::CsSynapseGroup, FiringRateSim::Neurons::RandomNeuron, AnimatSim::ExternalStimuli::ForceStimulus, AnimatSim::SimulationWindow, VortexAnimatSim::ExternalStimuli::VsForceStimulus, IntegrateFireSim::Synapses::SpikingChemicalSynapse, AnimatSim::Robotics::RobotPartInterface, FiringRateSim::Neurons::PacemakerNeuron, RoboticsAnimatSim::Robotics::RobotIOControls::RbXBeeCommander, OsgAnimatSim::Visualization::ControlPoint, VortexAnimatSim::Visualization::ControlPoint, AnimatSim::Node, AnimatSim::Gains::LengthTensionGain, RoboticsAnimatSim::Robotics::RobotIOControls::RbAnimatSerial, AnimatSim::ExternalStimuli::PropertyControlStimulus, AnimatSim::Robotics::RemoteControl, AnimatSim::Adapters::PropertyControlAdapter, AnimatSim::ExternalStimuli::InverseMuscleCurrent, RoboticsAnimatSim::Robotics::RobotIOControls::Firmata::RbFirmataHingeServo, AnimatSim::Robotics::PulsedLinkage, FiringRateSim::FiringRateModule, AnimatSim::ExternalStimuli::MotorStimulus, AnimatSim::Environment::ConstraintFriction, AnimatSim::ExternalStimuli::VoltageClamp, AnimatSim::Environment::Organism, VortexAnimatSim::ExternalStimuli::VsMotorVelocityStimulus, FiringRateSim::Neurons::BistableNeuron, AnimatSim::Robotics::RobotInterface, BulletAnimatSim::Environment::BlConstraintRelaxation, AnimatSimPy::ScriptProcessorPy, AnimatSim::Gains::BellGain, AnimatSim::Behavior::PhysicsNeuralModule, AnimatSim::Gains::PolynomialGain, AnimatSim::Gains::SigmoidGain, IntegrateFireSim::Gains::IonChannelSigmoid, AnimatCarlSim::CsAdapter, AnimatCarlSim::CsSpikeGeneratorGroup, AnimatSim::Environment::Odor, RoboticsAnimatSim::Robotics::RobotIOControls::Firmata::RbFirmataController, AnimatSim::ExternalStimuli::ExternalInputStimulus, AnimatSim::Environment::ConstraintRelaxation, BulletAnimatSim::Environment::BlMaterialType, RoboticsAnimatSim::Environment::RbMaterialType, OsgAnimatSim::Visualization::OsgScriptedSimulationWindow, VortexAnimatSim::Visualization::VsScriptedSimulationWindow, AnimatCarlSim::CsSynapseIndividual, AnimatSim::Environment::OdorType, AnimatCarlSim::CsNeuronDataColumn, RoboticsAnimatSim::Robotics::RobotIOControls::DynamixelUSB::RbDynamixelUSB, AnimatSim::Gains::EquationGain, AnimatSim::ExternalStimuli::EnablerStimulus, IntegrateFireSim::Synapses::NonSpikingChemicalSynapse, FiringRateSim::Synapses::ModulateNeuronPropSynapse, IntegrateFireSim::CaActivation, AnimatSim::Link, FiringRateSim::Synapses::GatedSynapse, FiringRateSim::Neurons::TonicNeuron, IntegrateFireSim::Synapses::Connexion, AnimatCarlSim::CsSynapseFull, IntegrateFireSim::Synapses::ElectricalSynapse, AnimatSim::ExternalStimuli::ExternalStimulus, HybridInterfaceSim::Robotics::HiSpike2, AnimatSim::PidControl, HybridInterfaceSim::Robotics::HiC884Controller, VortexAnimatSim::Environment::VsConstraintRelaxation, AnimatSim::Robotics::PassThroughLinkage, HybridInterfaceSim::Robotics::HiM110Actuator, and RoboticsAnimatSim::Robotics::RobotInterfaces::RbLANWirelessInterface.
Definition at line 371 of file AnimatBase.cpp.
References Initialize(), m_strID, m_strName, and Name().
Referenced by AnimatSim::ExternalStimuli::PropertyControlStimulus::Activate(), AnimatSim::ExternalStimuli::PropertyControlStimulus::Deactivate(), AnimatSim::Adapters::PropertyControlAdapter::ResetSimulation(), AnimatSim::PidControl::SetData(), AnimatSim::Link::SetData(), AnimatSim::Environment::OdorType::SetData(), AnimatSim::Environment::ConstraintRelaxation::SetData(), AnimatSim::Environment::Odor::SetData(), AnimatSim::Behavior::PhysicsNeuralModule::SetData(), AnimatSim::Robotics::RobotInterface::SetData(), AnimatSim::Environment::ConstraintFriction::SetData(), AnimatSim::Node::SetData(), AnimatSim::Robotics::RobotPartInterface::SetData(), AnimatSim::SimulationWindow::SetData(), AnimatSim::Environment::Light::SetData(), AnimatSim::Charting::DataColumn::SetData(), SetData(), AnimatSim::Robotics::RobotIOControl::SetData(), AnimatSim::Gains::Gain::SetData(), AnimatSim::ActivatedItem::SetData(), AnimatSim::Robotics::RemoteControlLinkage::SetData(), AnimatSim::Environment::ConstraintLimit::SetData(), AnimatSim::Environment::Structure::SetData(), and AnimatSim::Adapters::PropertyControlAdapter::SimStarting().
Here is the call graph for this function:
|
virtual |
Set a variable based on a string data type name.
This is a helper method for the string version.
| strDataType | string name of the data type to set. |
| fltValue | float value that will be converted to a string. |
| bThrowError | true to throw error if there is a problem. If false then it will not return an error, just return false. |
Definition at line 406 of file AnimatBase.cpp.
References SetData(), and StdUtils::Std_ToStr().
Here is the call graph for this function:
|
virtual |
Set a variable based on a string data type name.
This is a helper method for the string version.
| strDataType | string name of the data type to set. |
| fltValue | long value that will be converted to a string. |
| bThrowError | true to throw error if there is a problem. If false then it will not return an error, just return false. |
Definition at line 426 of file AnimatBase.cpp.
References SetData(), and StdUtils::Std_ToStr().
Here is the call graph for this function:
|
virtual |
Sets the system pointers.
There are a number of system pointers that are needed for use in the objects. The primariy one being a pointer to the simulation object itself so that you can get global parameters like the scale units and so on. However, each object may need other types of pointers as well, for example neurons need to have a pointer to their parent structure/organism, and to the NeuralModule they reside within. So different types of objects will need different sets of system pointers. We call this method to set the pointers just after creation and before Load is called. We then call VerifySystemPointers here, during Load and during Initialize in order to ensure that the correct pointers have been set for each type of objects. These pointers can then be safely used throughout the rest of the system.
| [in,out] | lpSim | The pointer to a simulation. |
| [in,out] | lpStructure | The pointer to the parent structure. |
| [in,out] | lpModule | The pointer to the parent module module. |
| [in,out] | lpNode | The pointer to the parent node. |
| bVerify | true to call VerifySystemPointers. |
Reimplemented in AnimatSim::Node, and AnimatSim::Link.
Referenced by AnimatSim::SimulationWindowMgr::AddSimulationWindow(), OsgAnimatSim::Visualization::OsgScriptedSimulationWindow::LoadCameraPath(), VortexAnimatSim::Visualization::VsScriptedSimulationWindow::LoadCameraPath(), AnimatSim::Environment::Joint::LoadConstraintFriction(), AnimatSim::Environment::Joint::LoadConstraintRelaxation(), AnimatSim::Charting::DataChartMgr::LoadDataChart(), AnimatSim::ExternalStimuli::ExternalStimuliMgr::LoadExternalStimuli(), AnimatSim::Adapters::ContactAdapter::LoadFieldPair(), AnimatSim::Gains::LoadGain(), AnimatSim::Robotics::RobotInterface::LoadIOControl(), IntegrateFireSim::Neuron::LoadIonChannel(), AnimatSim::Recording::SimulationRecorder::LoadKeyFrame(), AnimatSim::Environment::RigidBody::LoadOdor(), AnimatSim::Simulator::LoadOdorType(), AnimatSim::Robotics::RobotIOControl::LoadPartInterface(), AnimatSim::Environment::ContactSensor::LoadReceptiveField(), AnimatSim::Robotics::RemoteControl::LoadRemoteControlLinkage(), AnimatSim::Environment::Organism::LoadRobotInterface(), AnimatSim::Environment::Structure::LoadScript(), AnimatSim::Simulator::LoadScript(), AnimatSim::SimulationWindowMgr::LoadSimulationWindow(), and AnimatSim::Simulator::Simulator().
|
virtual |
Called just before the simulation pauses.
This method is called on each AnimatBase object when the simulation pauses. It allows it to perform any intialization prior to the pause of the simulation that is needed.
Reimplemented in AnimatSim::Simulator, AnimatSim::Environment::RigidBody, AnimatSim::Environment::Structure, and AnimatSimPy::ScriptProcessorPy.
Definition at line 665 of file AnimatBase.cpp.
Referenced by AnimatSim::Simulator::SimPausing().
Here is the caller graph for this function:
|
virtual |
Called just before the simulation starts.
This method is called on each AnimatBase object when the simulation starts. It allows it to perform any intialization prior to the beginning of the simulation that is needed.
Reimplemented in AnimatSim::Simulator, AnimatSim::Environment::Structure, OsgAnimatSim::Visualization::OsgLinearPath, VortexAnimatSim::Visualization::OsgLinearPath, AnimatCarlSim::CsNeuralModule, RoboticsAnimatSim::Robotics::RobotIOControls::RbXBeeCommander, RoboticsAnimatSim::Robotics::RobotIOControls::RbAnimatSerial, AnimatSimPy::ScriptProcessorPy, AnimatSim::Adapters::PropertyControlAdapter, OsgAnimatSim::Visualization::OsgScriptedSimulationWindow, and VortexAnimatSim::Visualization::VsScriptedSimulationWindow.
Definition at line 654 of file AnimatBase.cpp.
Referenced by AnimatSim::Simulator::SimStarting().
Here is the caller graph for this function:
|
virtual |
Called just before the simulation stops.
This method is called on each AnimatBase object when the simulation stops. It allows it to perform any intialization prior to the stop of the simulation that is needed.
Reimplemented in AnimatSim::Simulator, AnimatSim::Environment::Structure, AnimatSim::Robotics::RobotIOControl, AnimatCarlSim::CsNeuralModule, and AnimatSimPy::ScriptProcessorPy.
Definition at line 676 of file AnimatBase.cpp.
Referenced by AnimatSim::Robotics::RobotIOControl::SimStopping(), and AnimatSim::Simulator::SimStopping().
Here is the caller graph for this function:
|
virtual |
Step the simulation for this object.
This is called on an object each time it is stepped in the simulation. this is where its simulation code is processed. However, StepSimulation is not necessarily called every single time that the simulation as a whole is stepped. A good example of this is that neural modules can have different integration time steps. So a firing rate module may have a DT of 0.5 ms, while an integrate and fire model may have one of 0.1 ms. So the firing rate module would only get its StepSimulation method called every 5th time that the other module was called. This is all handed in the StepSimulation method of the Simulator and NervousSystem.
Reimplemented in AnimatSim::Simulator, AnimatSim::Environment::RigidBody, FiringRateSim::Neurons::Neuron, AnimatCarlSim::CsNeuronGroup, AnimatSim::Adapters::Adapter, IntegrateFireSim::IntegrateFireNeuralModule, AnimatSim::Behavior::NeuralModule, AnimatSim::Robotics::RemoteControlLinkage, AnimatSim::Charting::DataChart, AnimatSim::ExternalStimuli::CurrentStimulus, AnimatSim::Environment::Joint, AnimatSim::Robotics::RobotIOControl, AnimatCarlSim::CsSpikingCurrentSynapse, AnimatCarlSim::CsNeuralModule, AnimatSim::Charting::DataColumn, AnimatSim::ExternalStimuli::ForceStimulus, VortexAnimatSim::ExternalStimuli::VsForceStimulus, AnimatSim::Environment::Bodies::Stomach, FiringRateSim::Neurons::PacemakerNeuron, AnimatSim::Environment::Bodies::Mouth, VortexAnimatSim::Environment::Joints::VsHinge, AnimatSim::Behavior::NervousSystem, AnimatSim::ExternalStimuli::InverseMuscleCurrent, AnimatSim::Robotics::RemoteControl, BulletAnimatSim::Environment::Joints::BlHinge, AnimatSim::Adapters::PropertyControlAdapter, RoboticsAnimatSim::Robotics::RobotIOControls::Firmata::RbFirmataHingeServo, AnimatSim::Robotics::PulsedLinkage, AnimatSim::ExternalStimuli::PropertyControlStimulus, AnimatSim::Robotics::RobotInterface, FiringRateSim::Neurons::BistableNeuron, AnimatSim::Adapters::ContactAdapter, FiringRateSim::FiringRateModule, AnimatSim::ExternalStimuli::MotorStimulus, AnimatSim::ExternalStimuli::VoltageClamp, VortexAnimatSim::ExternalStimuli::VsMotorVelocityStimulus, BulletAnimatSim::Environment::Joints::BlPrismatic, AnimatSim::ActivatedItemMgr, VortexAnimatSim::VsSimulator, VortexAnimatSim::Environment::Bodies::VsSpring, AnimatCarlSim::CsSpikeGeneratorGroup, RoboticsAnimatSim::Environment::Joints::RbHinge, AnimatSim::Environment::Bodies::OdorSensor, AnimatSim::ExternalStimuli::ExternalInputStimulus, AnimatSim::Charting::MemoryChart, VortexAnimatSim::Environment::Joints::VsPrismatic, AnimatSim::ExternalStimuli::EnablerStimulus, AnimatSim::Environment::ReceptiveFieldPair, AnimatSim::ThreadProcessor, RoboticsAnimatSim::Environment::Joints::RbPrismatic, AnimatSim::Charting::ArrayChart, HybridInterfaceSim::Robotics::HiM110Actuator, AnimatSim::ModuleThreadProcessor, RoboticsAnimatSim::Robotics::RobotInterfaces::RbLANWirelessInterface, RoboticsAnimatSim::Robotics::RobotIOControls::Firmata::RbFirmataPrismaticServo, VortexAnimatSim::Environment::Bodies::VsLinearHillMuscle, VortexAnimatSim::Environment::Bodies::VsLinearHillStretchReceptor, RoboticsAnimatSim::Robotics::RobotIOControls::Firmata::RbFirmataAnalogInput, RoboticsAnimatSim::Robotics::RobotIOControls::Firmata::RbFirmataAnalogOutput, RoboticsAnimatSim::Robotics::RobotIOControls::Firmata::RbFirmataDigitalInput, RoboticsAnimatSim::Robotics::RobotIOControls::Firmata::RbFirmataDigitalOutput, RoboticsAnimatSim::Robotics::RobotIOControls::Firmata::RbFirmataPWMOutput, BulletAnimatSim::Environment::Bodies::BlLinearHillMuscle, RoboticsAnimatSim::Environment::Bodies::RbLinearHillMuscle, RoboticsAnimatSim::RbSimulator, BulletAnimatSim::Environment::Bodies::BlLinearHillStretchReceptor, RoboticsAnimatSim::Environment::Bodies::RbLinearHillStretchReceptor, BulletAnimatSim::Environment::Bodies::BlSpring, and RoboticsAnimatSim::Environment::Bodies::RbSpring.
Definition at line 643 of file AnimatBase.cpp.
Referenced by AnimatSim::ActivatedItemMgr::StepSimulation(), AnimatSim::Robotics::RobotInterface::StepSimulation(), AnimatSim::Robotics::RobotIOControl::StepSimulation(), AnimatSim::Environment::Joint::StepSimulation(), and AnimatSim::Environment::RigidBody::StepSimulation().
Here is the caller graph for this function:
|
virtual |
Notification method that the time step modified has been modified. Objects should recalculate any slice times as needed.
Reimplemented in FiringRateSim::Neurons::Neuron, IntegrateFireSim::IntegrateFireNeuralModule, AnimatSim::Adapters::Adapter, FiringRateSim::Synapses::Synapse, AnimatSim::ActivatedItem, AnimatCarlSim::CsSpikingCurrentSynapse, AnimatSim::Environment::BodyPart, and BulletAnimatSim::Environment::Joints::BlPrismatic.
Definition at line 685 of file AnimatBase.cpp.
Referenced by AnimatSim::Simulator::NotifyTimeStepModified(), AnimatSim::Environment::BodyPart::TimeStepModified(), and AnimatSim::Adapters::Adapter::TimeStepModified().
Here is the caller graph for this function:
|
virtual |
returns the string type name of this object.
Gets the string type description of this object. This is basically just another type of tag that can be applied by the developer of a class to differentiate it. An example of where this is used is in the synaptic types class. I use it to specify the synapse type as gated, modulatory, etc.. They still have different classes, but this gives a string description of that type. It is not mandatory and can be used how the class developer requires.
Reimplemented in AnimatSim::ExternalStimuli::CurrentStimulus, AnimatSim::ExternalStimuli::ForceStimulus, VortexAnimatSim::ExternalStimuli::VsForceStimulus, AnimatSim::Charting::DataChart, AnimatSim::ExternalStimuli::InverseMuscleCurrent, AnimatSim::ExternalStimuli::MotorStimulus, VortexAnimatSim::ExternalStimuli::VsMotorVelocityStimulus, AnimatSim::ExternalStimuli::VoltageClamp, AnimatSim::ExternalStimuli::PropertyControlStimulus, AnimatSim::Charting::FileChart, AnimatSim::Charting::MemoryChart, AnimatSim::ExternalStimuli::ExternalInputStimulus, AnimatSim::ExternalStimuli::EnablerStimulus, and AnimatSim::Charting::ArrayChart.
Definition at line 221 of file AnimatBase.cpp.
References m_strType.
Referenced by AnimatSim::Recording::KeyFrame::GenerateID(), IntegrateFireSim::IntegrateFireNeuralModule::LoadInternal(), FiringRateSim::FiringRateModule::LoadNetworkXml(), AnimatCarlSim::CsNeuralModule::LoadNetworkXml(), AnimatSim::Simulator::MoveKeyFrame(), and IntegrateFireSim::IntegrateFireNeuralModule::RemoveSynapseType().
Here is the caller graph for this function:
|
virtual |
Sets the class type for this object.
| strValue | The string value. |
Reimplemented in AnimatSim::ExternalStimuli::CurrentStimulus.
Definition at line 231 of file AnimatBase.cpp.
References m_strType.
|
virtual |
Verify that system pointers have been set correctly.
The system pointers should be set just after an object is created. However, if for some reason it was not then this could cause read/write memory access errors later on because we would be using NULL pointers. This method is called during SetSystemPointers, Load, and Initialize to verify that the pointers for that type of object have been set correctly. We are calling three different places to ensure that it is checked before use. For example, if you are doing a Load call then you want to check it before attempting the load, but there may be an object that does not Load, but only does Initialize. So we need to check it there as well.
Reimplemented in IntegrateFireSim::Neuron, FiringRateSim::Neurons::Neuron, AnimatCarlSim::CsNeuronGroup, AnimatSim::Environment::ConstraintLimit, FiringRateSim::Synapses::Synapse, AnimatCarlSim::CsSpikingCurrentSynapse, AnimatSim::Behavior::NeuralModule, AnimatCarlSim::CsSynapseGroup, AnimatSim::Charting::DataColumn, AnimatSim::Environment::Bodies::MuscleBase, AnimatSim::Behavior::NervousSystem, AnimatSim::Node, AnimatCarlSim::CsConnectionGenerator, IntegrateFireSim::Synapses::Connexion, AnimatSim::Link, and IntegrateFireSim::Synapses::SynapseType.
Definition at line 315 of file AnimatBase.cpp.
References m_lpSim.
Referenced by Initialize(), Load(), AnimatSim::Link::VerifySystemPointers(), AnimatSim::Node::VerifySystemPointers(), AnimatSim::Behavior::NervousSystem::VerifySystemPointers(), AnimatSim::Environment::Bodies::MuscleBase::VerifySystemPointers(), AnimatSim::Charting::DataColumn::VerifySystemPointers(), AnimatSim::Behavior::NeuralModule::VerifySystemPointers(), and AnimatSim::Environment::ConstraintLimit::VerifySystemPointers().
Here is the caller graph for this function:
|
virtual |
Visual selection mode changed.
This is called whenever the visual selection mode of the simulation is changed. This is when the user switches from selecting graphics, collision objects, joints, etc..
| iNewMode | The new mode. |
Reimplemented in AnimatSim::Environment::Light, and AnimatSim::Environment::BodyPart.
Definition at line 754 of file AnimatBase.cpp.
Referenced by AnimatSim::Simulator::VisualSelectionMode(), and AnimatSim::Environment::BodyPart::VisualSelectionModeChanged().
Here is the caller graph for this function: 1.8.10
1.8.10