|
AnimatLab
2
Test
|
|
AnimatLab
2
Test
|
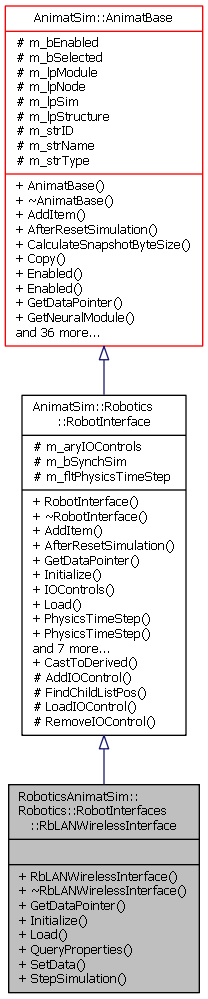
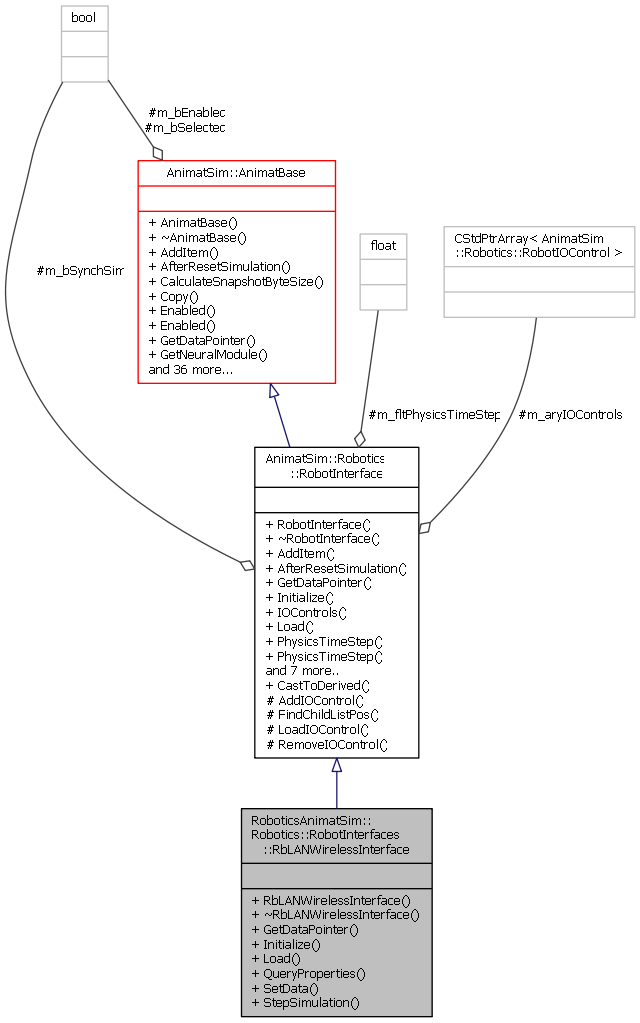
 Inheritance diagram for RoboticsAnimatSim::Robotics::RobotInterfaces::RbLANWirelessInterface: Collaboration diagram for RoboticsAnimatSim::Robotics::RobotInterfaces::RbLANWirelessInterface:
Inheritance diagram for RoboticsAnimatSim::Robotics::RobotInterfaces::RbLANWirelessInterface: Collaboration diagram for RoboticsAnimatSim::Robotics::RobotInterfaces::RbLANWirelessInterface:Public Member Functions | |
| virtual float * | GetDataPointer (const std::string &strDataType) |
| Returns a float pointer to a data item of interest in this object. More... | |
| virtual void | Initialize () |
| Initializes this object. More... | |
| virtual void | Load (StdUtils::CStdXml &oXml) |
| Loads the item using an XML data packet. More... | |
| virtual void | QueryProperties (CStdPtrArray< TypeProperty > &aryProperties) |
| virtual bool | SetData (const std::string &strDataType, const std::string &strValue, bool bThrowError=true) |
| Set a variable based on a string data type name. More... | |
| virtual void | StepSimulation () |
| Step the simulation for this object. More... | |
| Public Member Functions inherited from AnimatSim::Robotics::RobotInterface | |
| RobotInterface (void) | |
| Default constructor. More... | |
| virtual | ~RobotInterface (void) |
| Destructor. More... | |
| virtual bool | AddItem (const std::string &strItemType, const std::string &strXml, bool bThrowError=true, bool bDoNotInit=false) |
| Adds a new object to this parent. More... | |
| virtual void | AfterResetSimulation () |
| Called after a simulation reset for some objects. More... | |
| virtual CStdPtrArray< RobotIOControl > * | IOControls () |
| Gets the array of IO controls. More... | |
| virtual void | Load (CStdXml &oXml) |
| virtual float | PhysicsTimeStep () |
| Gets the physics time step used within the robot framwork. More... | |
| virtual void | PhysicsTimeStep (float fltStep) |
| Sets the physics time step used within the robot framwork. More... | |
| virtual void | QueryProperties (CStdPtrArray< TypeProperty > &aryProperties) |
| Queries this object for a list of properties that can be changed using SetData. More... | |
| virtual bool | RemoveItem (const std::string &strItemType, const std::string &strID, bool bThrowError=true) |
| Removes a child item from this parent. More... | |
| virtual void | ResetSimulation () |
| Resets the simulation back to time 0. More... | |
| virtual bool | SynchSim () |
| Gets whether we need to delay stepping of the physics adapters in the simulation to more closely match the real robot behavior. More... | |
| virtual void | SynchSim (bool bVal) |
| Sets whether we need to delay stepping of the physics adapters in the simulation to more closely match the real robot behavior. More... | |
| Public Member Functions inherited from AnimatSim::AnimatBase | |
| AnimatBase () | |
| Constructs an AnimatBase object. More... | |
| virtual | ~AnimatBase () |
| Destroys the AnimatBase object.. More... | |
| virtual long | CalculateSnapshotByteSize () |
| Calculates the snapshot byte size. More... | |
| virtual void | Copy (CStdSerialize *lpSource) |
| virtual void | Enabled (bool bVal) |
| Tells whether this item is enabled or not. This is not actually used for all objects, only specific ones. I am putting it in the base class though to prevent numerous duplications. More... | |
| virtual bool | Enabled () |
| Tells whether this item is enabled or not. This is not actually used for all objects, only specific ones. I am putting it in the base class though to prevent numerous duplications. More... | |
| virtual NeuralModule * | GetNeuralModule () |
| Gets the neural module. More... | |
| virtual Node * | GetNode () |
| Gets the node. More... | |
| virtual Simulator * | GetSimulator () |
| Gets the simulator pointer. More... | |
| virtual Structure * | GetStructure () |
| Gets the structure for this node. More... | |
| virtual bool | HasProperty (const std::string &strName) |
| Queries this object if it has a property with the given name. More... | |
| virtual std::string | ID () |
| Gets the unique GUID ID of this object. More... | |
| virtual void | ID (std::string strValue) |
| Sets the unique GUID ID of the object. More... | |
| virtual void | Kill (bool bState=true) |
| Kills. More... | |
| virtual void | LoadKeyFrameSnapshot (byte *aryBytes, long &lIndex) |
| Loads a key frame snapshot. More... | |
| virtual std::string | Name () |
| Gets the name of this object. More... | |
| virtual void | Name (std::string strValue) |
| Sets the name of the object. Blank is acceptable. More... | |
| virtual AnimatPropertyType | PropertyType (const std::string &strName) |
| virtual void | ReInitialize () |
| Re-initialize this object. More... | |
| virtual void | Reset () |
| Resets this object. More... | |
| virtual void | RigidBodyAdded (std::string strID) |
| virtual void | RigidBodyRemoved (std::string strID) |
| virtual void | SaveKeyFrameSnapshot (byte *aryBytes, long &lIndex) |
| Saves a key frame snapshot. More... | |
| virtual bool | Selected () |
| Tells if this items is selected or not. More... | |
| virtual void | Selected (bool bValue, bool bSelectMultiple) |
| Selects this object. More... | |
| virtual bool | SetData (const std::string &strDataType, const float fltValue, bool bThrowError=true) |
| Set a variable based on a string data type name. More... | |
| virtual bool | SetData (const std::string &strDataType, const long lValue, bool bThrowError=true) |
| Set a variable based on a string data type name. More... | |
| virtual void | SetSystemPointers (Simulator *lpSim, Structure *lpStructure, NeuralModule *lpModule, Node *lpNode, bool bVerify) |
| Sets the system pointers. More... | |
| virtual void | SimPausing () |
| Called just before the simulation pauses. More... | |
| virtual void | SimStarting () |
| Called just before the simulation starts. More... | |
| virtual void | SimStopping () |
| Called just before the simulation stops. More... | |
| virtual void | TimeStepModified () |
| Notification method that the time step modified has been modified. Objects should recalculate any slice times as needed. More... | |
| virtual std::string | Type () |
| returns the string type name of this object. More... | |
| virtual void | Type (std::string strValue) |
| Sets the class type for this object. More... | |
| virtual void | VerifySystemPointers () |
| Verify that system pointers have been set correctly. More... | |
| virtual void | VisualSelectionModeChanged (int iNewMode) |
| Visual selection mode changed. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from AnimatSim::Robotics::RobotInterface | |
| static RobotInterface * | CastToDerived (AnimatBase *lpBase) |
| Protected Member Functions inherited from AnimatSim::Robotics::RobotInterface | |
| virtual RobotIOControl * | AddIOControl (std::string strXml) |
| Creates and adds a robot IO control. More... | |
| virtual int | FindChildListPos (std::string strID, bool bThrowError=true) |
| Finds the array index for the child part with the specified ID. More... | |
| virtual RobotIOControl * | LoadIOControl (CStdXml &oXml) |
| Loads a child IO Control. More... | |
| virtual void | RemoveIOControl (std::string strID, bool bThrowError=true) |
| Removes the rigid body with the specified ID. More... | |
| Protected Attributes inherited from AnimatSim::Robotics::RobotInterface | |
| CStdPtrArray< RobotIOControl > | m_aryIOControls |
| bool | m_bSynchSim |
| float | m_fltPhysicsTimeStep |
| Protected Attributes inherited from AnimatSim::AnimatBase | |
| bool | m_bEnabled |
| Tells if this item is enabled or not. If it is not enabled then it is not run. | |
| bool | m_bSelected |
| Tells whether the object is selected or not. | |
| AnimatSim::Behavior::NeuralModule * | m_lpModule |
| The pointer to this items parentNeuralModule. If this is not relevant for this object then this is NULL. | |
| Node * | m_lpNode |
| The pointer to this items parent Node. If this is not relevant for this object then this is NULL. | |
| Simulator * | m_lpSim |
| The pointer to a Simulation. | |
| AnimatSim::Environment::Structure * | m_lpStructure |
| The pointer to this items parent Structure. If this is not relevant for this object then this is NULL. | |
| std::string | m_strID |
| The unique Id for this object. | |
| std::string | m_strName |
| The name for this object. | |
| std::string | m_strType |
| The type for this object. Examples are Box, Plane, Neuron, etc.. | |
Definition at line 14 of file RbLANWirelessInterface.h.
|
virtual |
Returns a float pointer to a data item of interest in this object.
This is a generic method used to get a pointer to data variable of interest. It is used by a variety of systems in the simulation. The most prominent are the data charting and stimulus classes. Within this method we associate a variable with a string name. By passing in the name of the data type we are interested in we can recieve back a float pointer to that data type. We can use that to read or set the data item in other classes. For example, the data charting system gets the pointer and then each time it needs to log a data point it reads the value into an array.
| strDataType | name of the data item for which we are looking. |
| If | DataType is not found. |
Reimplemented from AnimatSim::Robotics::RobotInterface.
Definition at line 45 of file RbLANWirelessInterface.cpp.
References AnimatSim::AnimatBase::m_strName, and StdUtils::Std_CheckString().
Here is the call graph for this function:
|
virtual |
Initializes this object.
After an object is loaded in it must be initialized before it can be used. This allows the object to retrieve any pointers or setup memory that it will need during execution. Each object is responsible for initializing any of its child objects, so you simply need to call this method on the containing class to init all child objects. It also calls VerifySystemPointers to make sure that the system pointers have been setup correctly.
Reimplemented from AnimatSim::Robotics::RobotInterface.
Definition at line 96 of file RbLANWirelessInterface.cpp.
|
virtual |
Loads the item using an XML data packet.
This method is responsible for loading the structure from a XMl configuration file. You should call this method even in your overriden function becuase it loads all of the base properties for this object like ID and Name. It also includes this object in the simulators AddToObjectList so that the simulator knows about this object when you do a FindObject call. If you do not call this base method then it is up to you to add your item to the simulators list of objects.
| [in,out] | oXml | The CStdXml xml data packet to load. |
Reimplemented from AnimatSim::AnimatBase.
Definition at line 106 of file RbLANWirelessInterface.cpp.
|
virtual |
Set a variable based on a string data type name.
This is a generic method that can be used to set any variable in an AnimatBase object by specifying the name of the variable and a string representation of that data. The GUI uses this method to set data into variables in the simulation when the user changes them in the UI. The value string can be as simple as a float or int, or as complex as an xml packet. It is the developers responsibilty to know what type of data is needed and to process it accordingly.
| strDataType | string name of the data type to set. |
| strValue | The string value of the data. It is up to the developer to determine what this should be. For example, in most cases it is simply a float and you just have to convert it to a float and make the appropriate mutator method call. However, it can be any type of string, including an entire xml packet. It is the developers responsibility to know how to set and process the data as required. |
| bThrowError | true to throw error if there is a problem. If false then it will not return an error, just return false. |
Reimplemented from AnimatSim::Robotics::RobotInterface.
Definition at line 57 of file RbLANWirelessInterface.cpp.
References StdUtils::Std_CheckString().
Here is the call graph for this function:
|
virtual |
Step the simulation for this object.
This is called on an object each time it is stepped in the simulation. this is where its simulation code is processed. However, StepSimulation is not necessarily called every single time that the simulation as a whole is stepped. A good example of this is that neural modules can have different integration time steps. So a firing rate module may have a DT of 0.5 ms, while an integrate and fire model may have one of 0.1 ms. So the firing rate module would only get its StepSimulation method called every 5th time that the other module was called. This is all handed in the StepSimulation method of the Simulator and NervousSystem.
Reimplemented from AnimatSim::Robotics::RobotInterface.
Definition at line 101 of file RbLANWirelessInterface.cpp.
 1.8.10
1.8.10