|
AnimatLab
2
Test
|
|
AnimatLab
2
Test
|
The base class for all of the basic rigid body type of objects. More...
#include <RigidBody.h>
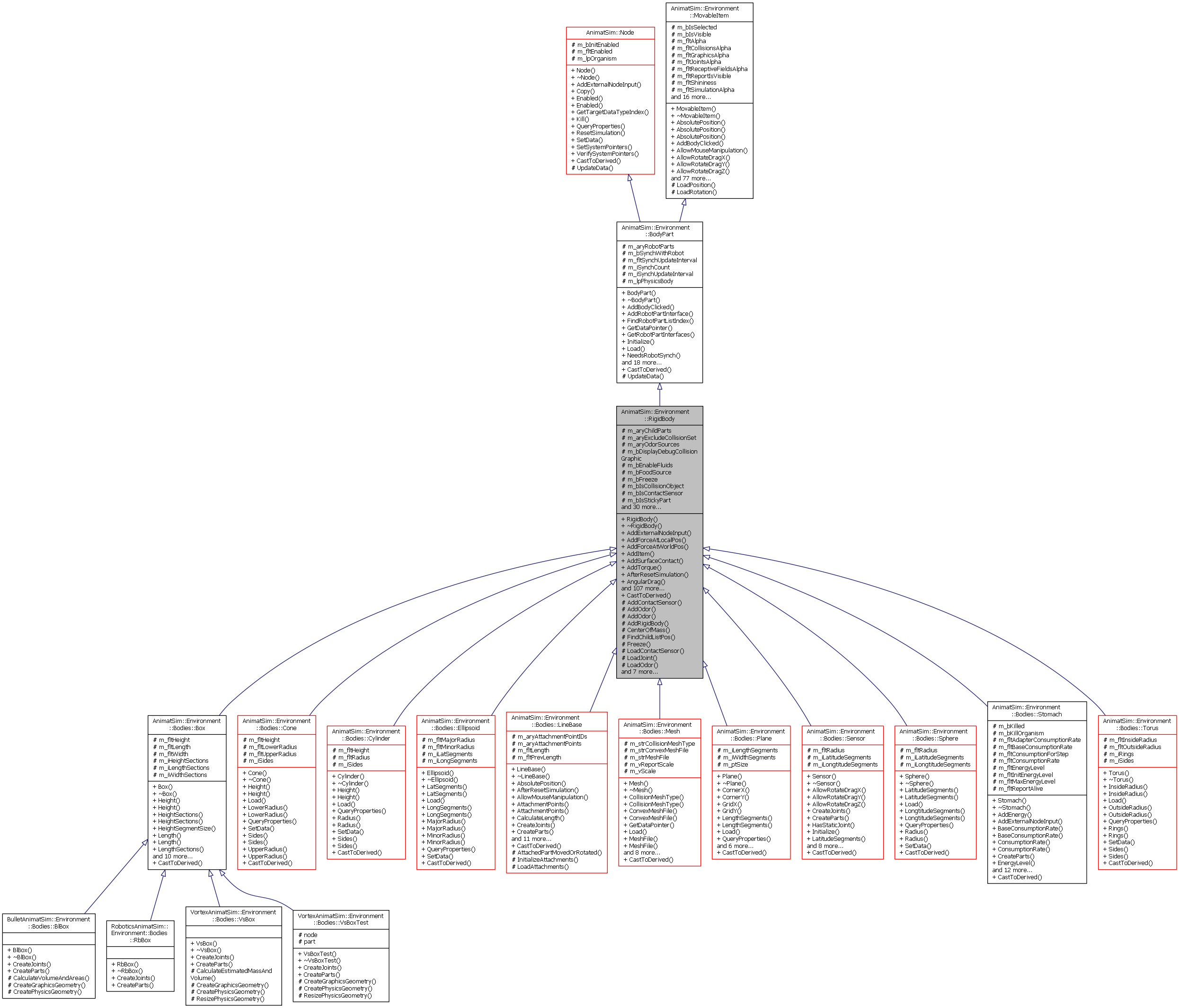
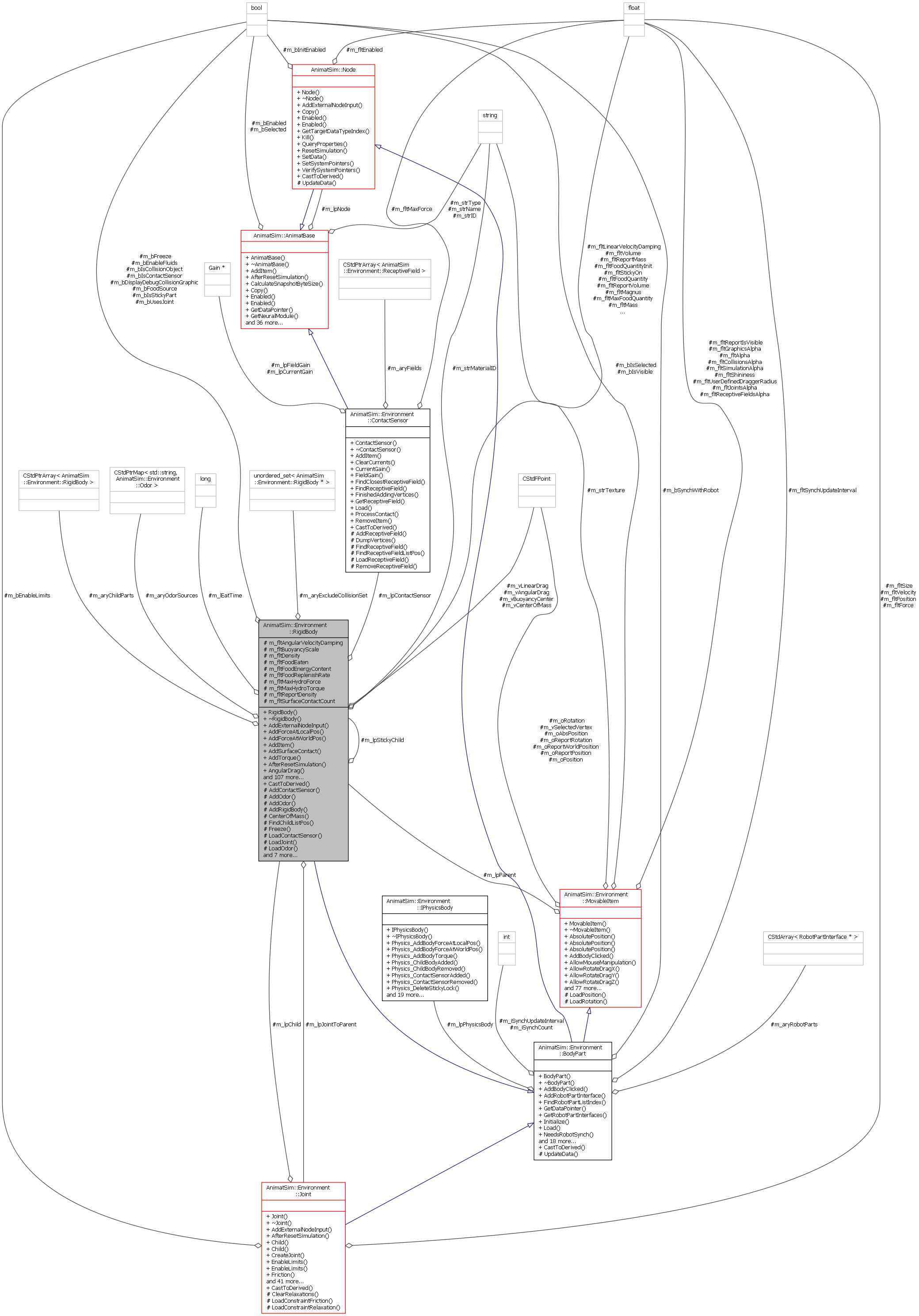
 Inheritance diagram for AnimatSim::Environment::RigidBody: Collaboration diagram for AnimatSim::Environment::RigidBody:
Inheritance diagram for AnimatSim::Environment::RigidBody: Collaboration diagram for AnimatSim::Environment::RigidBody:Public Member Functions | |
| RigidBody () | |
| Default constructor. More... | |
| virtual | ~RigidBody () |
| Destructor. More... | |
| virtual void | AddExternalNodeInput (int iTargetDataType, float fltInput) |
| Adds an external node input. More... | |
| virtual void | AddForceAtLocalPos (float fltPx, float fltPy, float fltPz, float fltFx, float fltFy, float fltFz, bool bScaleUnits) |
| Adds a world-coordinate based force vector to this body at a specified local body position. More... | |
| virtual void | AddForceAtWorldPos (float fltPx, float fltPy, float fltPz, float fltFx, float fltFy, float fltFz, bool bScaleUnits) |
| Adds a world-coordinate based force vector to this body at a specified world-coordinate body position. More... | |
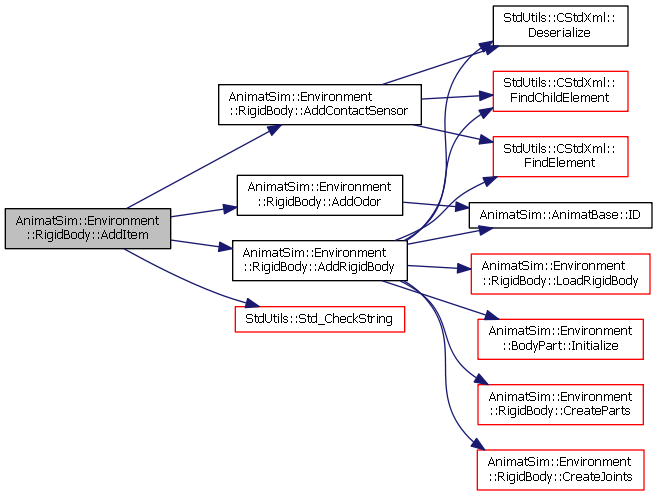
| virtual bool | AddItem (const std::string &strItemType, const std::string &strXml, bool bThrowError=true, bool bDoNotInit=false) |
| Adds a new object to this parent. More... | |
| virtual void | AddSurfaceContact (RigidBody *lpContactedSurface) |
| Increments the surface contact count when this part collides with something in the virtual world. More... | |
| virtual void | AddTorque (float fltTx, float fltTy, float fltTz, bool bScaleUnits) |
| Adds a torque to this body about its center. More... | |
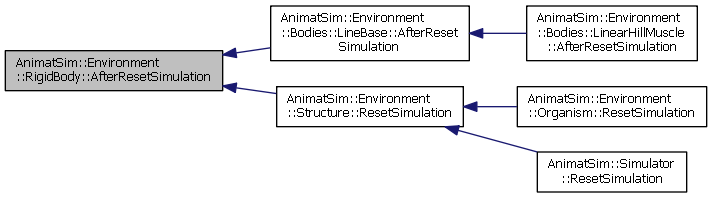
| virtual void | AfterResetSimulation () |
| Called after a simulation reset for some objects. More... | |
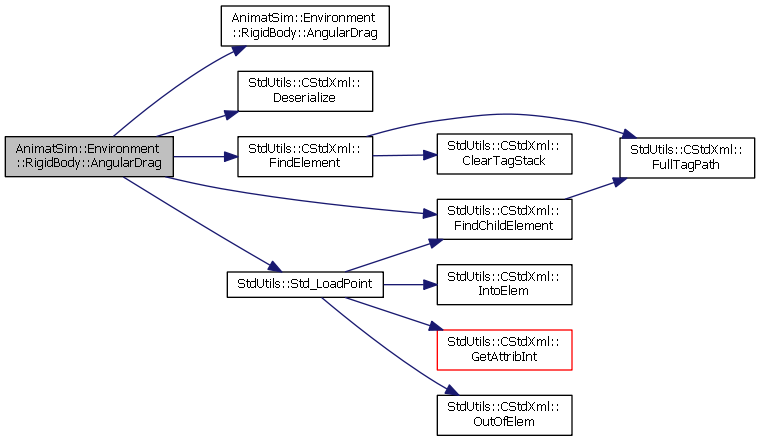
| virtual CStdFPoint | AngularDrag () |
| Gets the angular drag coefficients for the three axises for the body. More... | |
| virtual void | AngularDrag (CStdFPoint &oPoint) |
| Sets the angular drag coefficients for the three axises for the body. More... | |
| virtual void | AngularDrag (float fltX, float fltY, float fltZ) |
| Sets the angular drag coefficients for the three axises for the body. More... | |
| virtual void | AngularDrag (std::string strXml) |
| Sets the angular drag coefficients for the three axises for the body. This method is primarily used by the GUI to reset the local position using an xml data packet. More... | |
| virtual float | AngularVelocityDamping () |
| Gets the angular velocity damping. More... | |
| virtual void | AngularVelocityDamping (float fltVal, bool bUseScaling=true) |
| Sets the angular velocity damping. More... | |
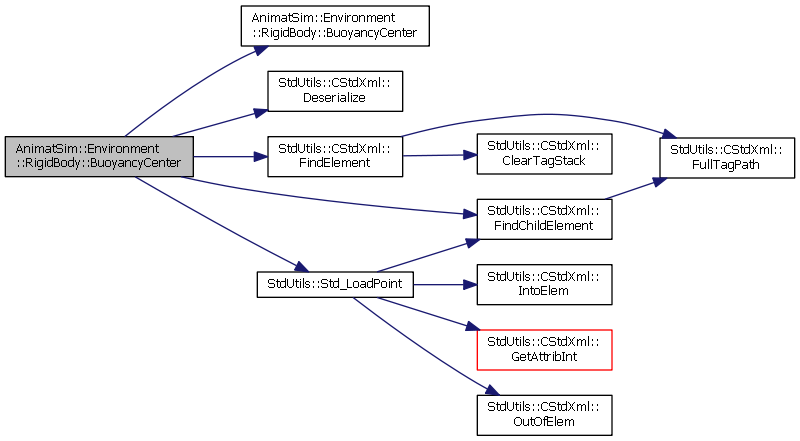
| virtual CStdFPoint | BuoyancyCenter () |
| Gets the relative position to the center of the buoyancy in the body. More... | |
| virtual void | BuoyancyCenter (CStdFPoint &oPoint, bool bUseScaling=true) |
| Sets the relative position to the center of the buoyancy in the body. More... | |
| virtual void | BuoyancyCenter (float fltX, float fltY, float fltZ, bool bUseScaling=true) |
| Sets the relative position to the center of the buoyancy in the body. More... | |
| virtual void | BuoyancyCenter (std::string strXml, bool bUseScaling=true) |
| Sets tthe relative position to the center of the buoyancy in the body. This method is primarily used by the GUI to reset the local position using an xml data packet. More... | |
| virtual float | BuoyancyScale () |
| Gets the scale used to calculate the buoyancy value. More... | |
| virtual void | BuoyancyScale (float fltVal) |
| Sets the scale used to calculate the buoyancy value. More... | |
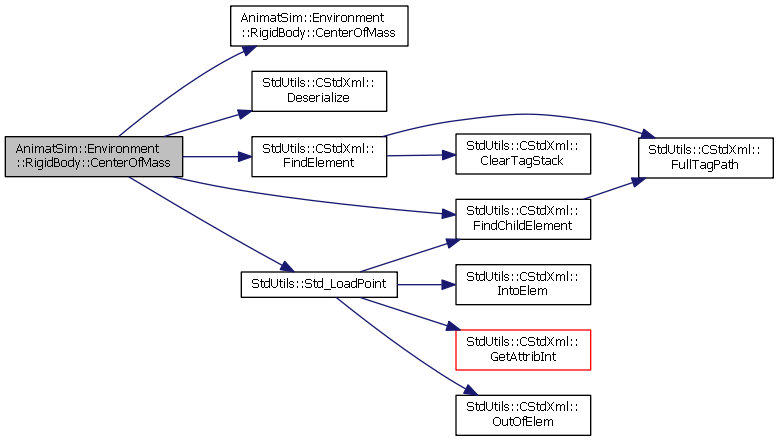
| virtual CStdFPoint | CenterOfMass () |
| Gets the user specified center of mass. More... | |
| virtual void | CenterOfMass (CStdFPoint &vPoint, bool bUseScaling=true) |
| Sets the user specified center of mass for this part. (m_vCenterOfMass). If COM is (0,0,0) then it is not used. More... | |
| virtual void | CenterOfMass (float fltX, float fltY, float fltZ, bool bUseScaling=true) |
| Sets the center of mass position. (m_vCenterOfMass). If COM is (0,0,0) then it is not used. More... | |
| virtual void | CenterOfMass (std::string strXml, bool bUseScaling=true) |
| Sets the center of mass position for the body. (m_vCenterOfMass). This method is primarily used by the GUI to reset the local position using an xml data packet. If COM is (0,0,0) then it is not used. More... | |
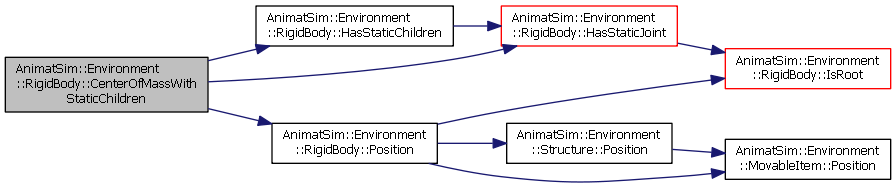
| virtual CStdFPoint | CenterOfMassWithStaticChildren () |
| Gets the center of mass of this part with any static children added. More... | |
| virtual CStdPtrArray< RigidBody > * | ChildParts () |
| Gets the array of child parts. More... | |
| virtual void | CreateChildJoints () |
| Loops through all the child parts of this rigid body and call CreateJoints. More... | |
| virtual void | CreateChildParts () |
| Loops through all the child parts of this rigid body and call CreateParts. More... | |
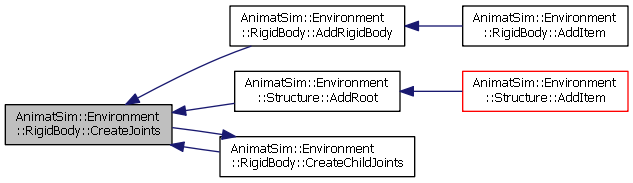
| virtual void | CreateJoints () |
| Allows the rigid body to create its joints using the chosen physics engine. More... | |
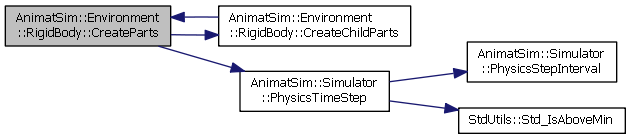
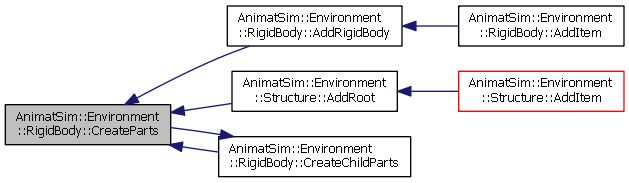
| virtual void | CreateParts () |
| Allows the rigid body to create its parts using the chosen physics engine. More... | |
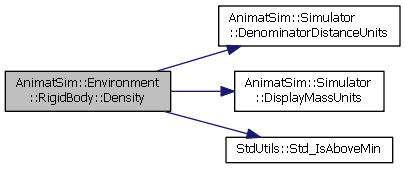
| virtual float | Density () |
| Gets the uniform density. More... | |
| virtual void | Density (float fltVal, bool bUseScaling=true) |
| Sets the uniform density of this part. More... | |
| virtual void | DisableCollision (RigidBody *lpBody) |
| Disables collision between the past-in object and this object. More... | |
| virtual bool | DisplayDebugCollisionGraphic () |
| virtual void | DisplayDebugCollisionGraphic (bool bVal) |
| virtual void | Eat (float fltBiteSize, long lTimeSlice) |
| This item is eating the specified amount of food. More... | |
| virtual void | EnableCollision (RigidBody *lpBody) |
| Enables collision between the past-in object and this object. More... | |
| virtual bool | EnableFluids () |
| Query if this object has fluid interactions turned on. More... | |
| virtual void | EnableFluids (bool bVal) |
| Sets whether this object has fluid interactions turned on. More... | |
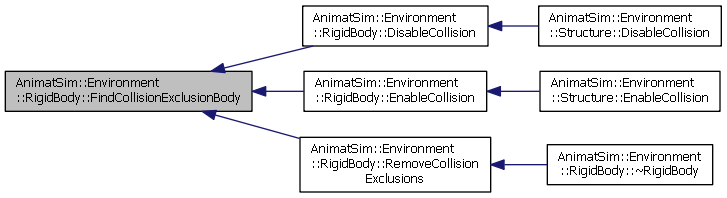
| virtual bool | FindCollisionExclusionBody (RigidBody *lpBody, bool bThrowError=true) |
| Searches the exclusion collision list to see if the specified part is already present. More... | |
| virtual float | FoodEaten () |
| Gets the amount of food eaten. More... | |
| virtual void | FoodEaten (float fltVal) |
| Sets the amount of food eaten. More... | |
| virtual float | FoodEnergyContent () |
| Gets the food energy content. More... | |
| virtual void | FoodEnergyContent (float fltVal) |
| Sets the food energy content. More... | |
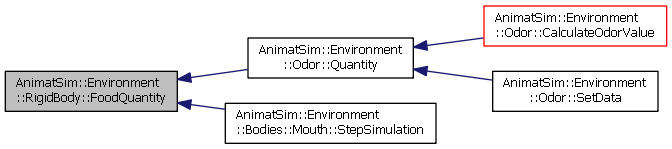
| virtual float | FoodQuantity () |
| Gets the food quantity. More... | |
| virtual void | FoodQuantity (float fltVal) |
| Sets the Food quantity. More... | |
| virtual float | FoodReplenishRate () |
| Gets the food replenish rate. More... | |
| virtual void | FoodReplenishRate (float fltVal) |
| Sets the food replenish rate. More... | |
| virtual bool | Freeze () |
| Tells if this part is frozen or not. More... | |
| virtual void | Freeze (bool bVal) |
| Freezes. More... | |
| virtual ContactSensor * | GetContactSensor () |
| Gets the receptive field contact sensor. More... | |
| virtual float * | GetDataPointer (const std::string &strDataType) |
| virtual float | GetDensity () |
| Gets the density of this part. More... | |
| virtual std::unordered_set< RigidBody * > * | GetExclusionCollisionSet () |
| virtual float | GetMass () |
| Gets the mass of this part. More... | |
| virtual float | GetMassValueWithStaticChildren () |
| Gets the mass of this part and all static children. More... | |
| virtual int | GetTargetDataTypeIndex (const std::string &strDataType) |
| Used to convert a string target data type into an integer index. More... | |
| virtual CStdFPoint | GetVelocityAtPoint (float x, float y, float z) |
| Gets a velocity of this body at specified point in the body. More... | |
| virtual float | GetVolume () |
| Gets the volume of this part. More... | |
| virtual bool | HasCollisionGeometry () |
| virtual bool | HasStaticChildren () |
| Query if this rigid body has any static children. More... | |
| virtual bool | HasStaticJoint () |
| Query if this object has a static joint. More... | |
| virtual bool | IsCollisionObject () |
| Query if this object is collision object. More... | |
| virtual void | IsCollisionObject (bool bVal) |
| Sets whether this part is a collision object. More... | |
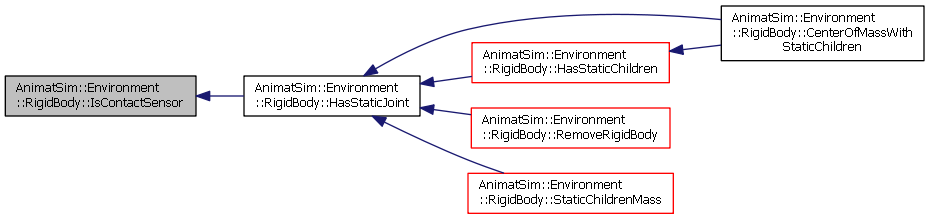
| virtual bool | IsContactSensor () |
| Query if this object is contact sensor. More... | |
| virtual void | IsContactSensor (bool bVal) |
| Sets whether this is a contact sensor. More... | |
| virtual bool | IsFoodSource () |
| Query if this object is food source. More... | |
| virtual void | IsFoodSource (bool bVal) |
| Sets if this is a food source. More... | |
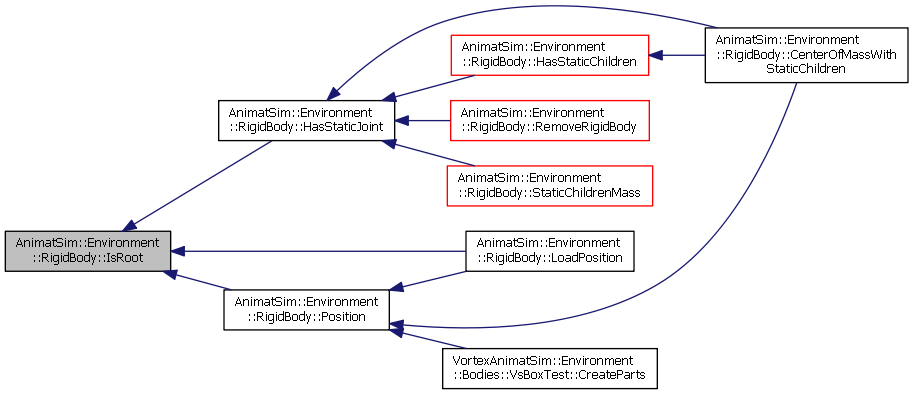
| virtual bool | IsRoot () |
| Query if this is the root rigid body of the structure or not. More... | |
| virtual bool | IsStickyPart () |
| Query if this object acts as a sticky part. This only applies to contact sensors. If it is set to true and StickOn is true then when this part touches something else it will create a locked joint between those two parts. When StickOn goes to false then that joint will be removed. This allows the contact sensor to act as a kind of sticky pick up pad. More... | |
| virtual void | IsStickyPart (bool bVal) |
| Sets whether this part is a sticky part or not. More... | |
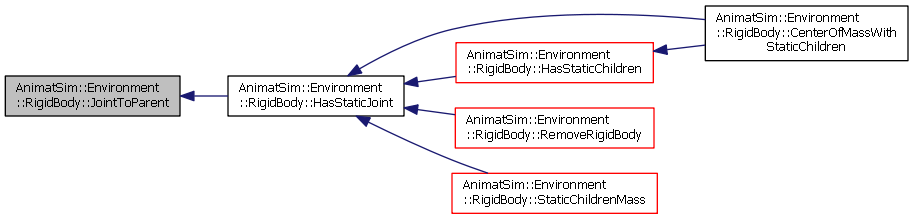
| virtual Joint * | JointToParent () |
| Gets the joint to parent. More... | |
| virtual void | JointToParent (Joint *lpValue) |
| Sets the joint to parent. More... | |
| virtual void | Kill (bool bState=true) |
| Kills. More... | |
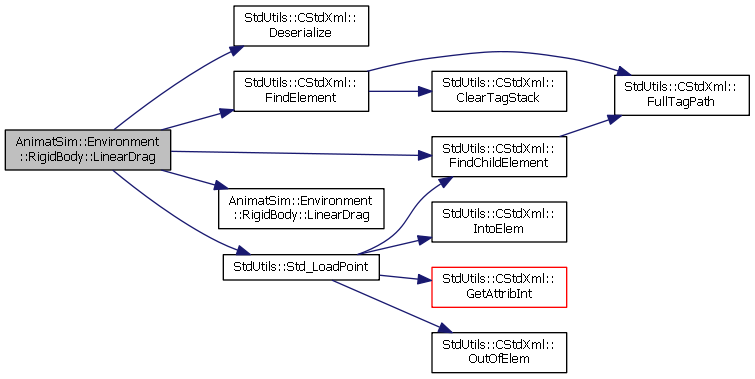
| virtual CStdFPoint | LinearDrag () |
| Gets the linear drag coefficients for the three axises for the body. More... | |
| virtual void | LinearDrag (CStdFPoint &oPoint) |
| Sets the linear drag coefficients for the three axises for the body. More... | |
| virtual void | LinearDrag (float fltX, float fltY, float fltZ) |
| Sets the linear drag coefficients for the three axises for the body. More... | |
| virtual void | LinearDrag (std::string strXml) |
| Sets the linear drag coefficients for the three axises for the body. This method is primarily used by the GUI to reset the local position using an xml data packet. More... | |
| virtual float | LinearVelocityDamping () |
| Gets the linear velocity damping for this body part. More... | |
| virtual void | LinearVelocityDamping (float fltVal, bool bUseScaling=true) |
| Sets the Linear velocity damping. More... | |
| virtual void | Load (CStdXml &oXml) |
| virtual float | Magnus () |
| Gets the Magnus coefficient for the body. More... | |
| virtual void | Magnus (float fltVal) |
| Sets the Magnus coefficient for the body. More... | |
| virtual float | Mass () |
| virtual void | Mass (float fltVal, bool bUseScaling=true) |
| virtual float | MassWithChildren () |
| virtual std::string | MaterialID () |
| Gets the material ID for this part. More... | |
| virtual void | MaterialID (std::string strID) |
| Sets the Material ID for this part. More... | |
| virtual float | MaxFoodQuantity () |
| Gets the maximum food quantity. More... | |
| virtual void | MaxFoodQuantity (float fltVal) |
| Sets the maximum Food quantity. More... | |
| virtual float | MaxHydroForce () |
| Gets the maximum linear hydrodynamic force that can be applied to this part. More... | |
| virtual void | MaxHydroForce (float fltVal, bool bUseScaling=true) |
| Sets the maximum linear hydrodynamic force that can be applied to this part. More... | |
| virtual float | MaxHydroTorque () |
| Gets the maximum angular hydrodynamic torque that can be applied to this part. More... | |
| virtual void | MaxHydroTorque (float fltVal, bool bUseScaling=true) |
| Sets the maximum angular hydrodynamic torque that can be applied to this part. More... | |
| virtual RigidBody * | ParentWithCollisionGeometry () |
| Gets a parent that has collision geometry. More... | |
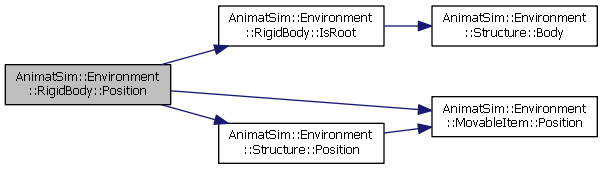
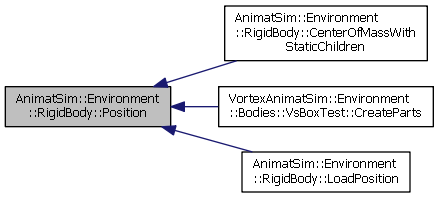
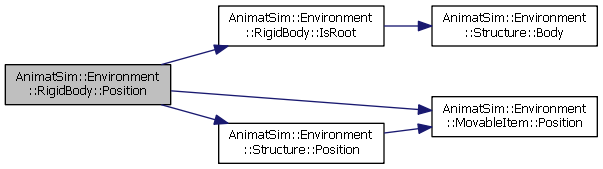
| virtual CStdFPoint | Position () |
| Gets the local position. (m_oPosition) More... | |
| virtual void | Position (CStdFPoint &oPoint, bool bUseScaling=true, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| virtual void | QueryProperties (CStdPtrArray< TypeProperty > &aryProperties) |
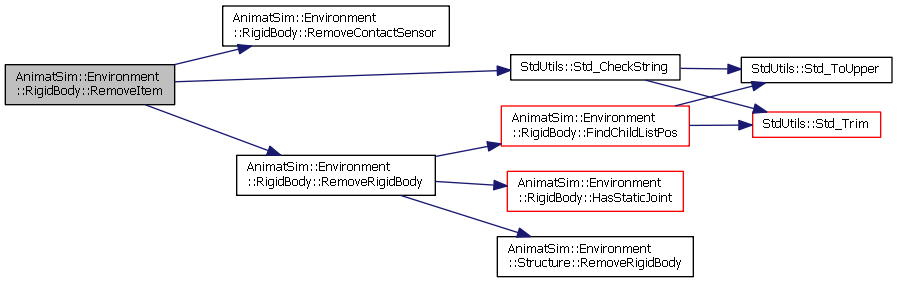
| virtual bool | RemoveItem (const std::string &strItemType, const std::string &strID, bool bThrowError=true) |
| Removes a child item from this parent. More... | |
| virtual void | RemoveSurfaceContact (RigidBody *lpContactedSurface) |
| Decrements the surface contact count when this part stops colliding with something in the virtual world. More... | |
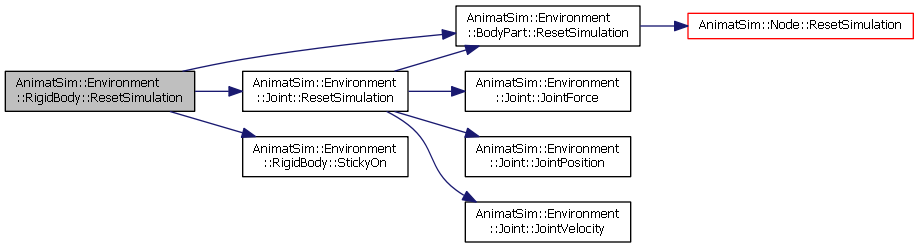
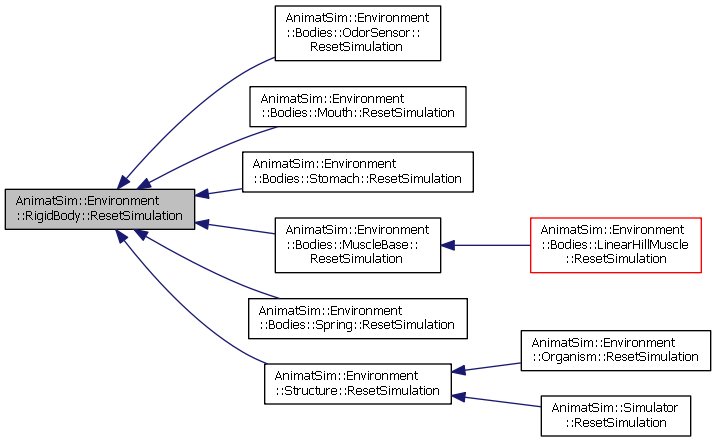
| virtual void | ResetSimulation () |
| Resets the simulation back to time 0. More... | |
| virtual bool | SetData (const std::string &strDataType, const std::string &strValue, bool bThrowError=true) |
| virtual void | SetSurfaceContactCount (int iCount) |
| Direclty sets the surface contact count for when this part is contacting another rigid body part. More... | |
| virtual void | SimPausing () |
| Called just before the simulation pauses. More... | |
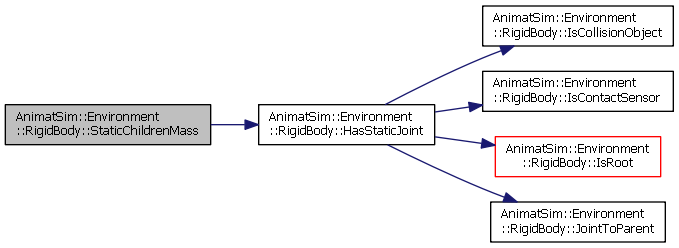
| virtual float | StaticChildrenMass () |
| Gets the mass of all static children. More... | |
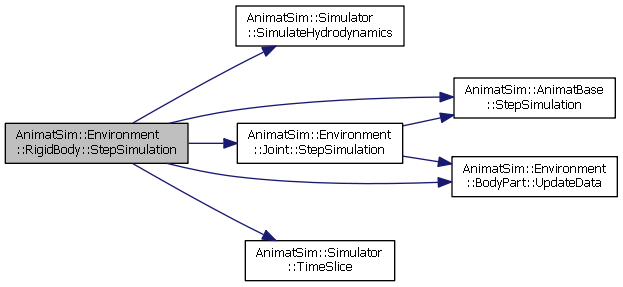
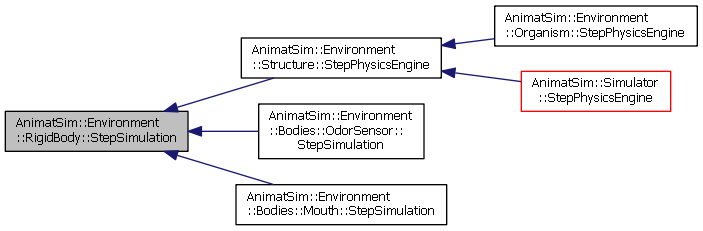
| virtual void | StepSimulation () |
| Step the simulation for this object. More... | |
| virtual RigidBody * | StickyChild () |
| Gets the child body part we are stuck to for a sticky part. More... | |
| virtual void | StickyChild (RigidBody *lpChild) |
| Sets the child part that we are stuck to if this is a sticky part. More... | |
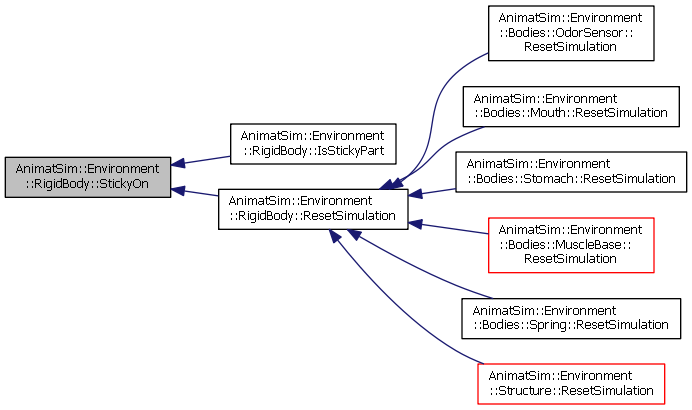
| virtual float | StickyOn () |
| Query if this stickyness is turned on or not. This only applies to contact sensors that also have IsStickyPart true. More... | |
| virtual void | StickyOn (float fltVal) |
| Sets whether this part has sticky on or not. More... | |
| virtual float | SurfaceContactCount () |
| Gets the surface contact count. More... | |
| virtual void | UpdateChildPhysicsPosFromGraphics () |
| virtual void | UpdatePhysicsPosFromGraphics () |
| Updates the physics position from graphics. More... | |
| virtual int | VisualSelectionType () |
| Gets the visual selection type for this part. More... | |
| virtual float | Volume () |
| virtual void | Volume (float fltVal, bool bUseScaling=true) |
| Public Member Functions inherited from AnimatSim::Environment::BodyPart | |
| BodyPart (void) | |
| Default constructor. More... | |
| virtual | ~BodyPart (void) |
| Destructor. More... | |
| virtual void | AddBodyClicked (float fltPosX, float fltPosY, float fltPosZ, float fltNormX, float fltNormY, float fltNormZ) |
| Called when the user clicks on this object while the AddBody mode is active. More... | |
| virtual void | AddRobotPartInterface (RobotPartInterface *lpPart) |
| virtual int | FindRobotPartListIndex (std::string strID, bool bThrowError=true) |
| Finds the index of a robot part attached to this body part with the matching ID. More... | |
| virtual CStdArray< RobotPartInterface * > * | GetRobotPartInterfaces () |
| Gets a pointer to the roboto part interface associated with this body part. More... | |
| virtual void | Initialize () |
| Initializes this object. More... | |
| virtual bool | NeedsRobotSynch () |
| virtual IPhysicsBody * | PhysicsBody () |
| Gets the physics body interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each box, sphere, etc.. More... | |
| virtual void | PhysicsBody (IPhysicsBody *lpBody) |
| Sets the physics body interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each box, sphere, etc.. More... | |
| virtual void | RemoveRobotPartInterface (RobotPartInterface *lpPart) |
| virtual void | Resize () |
| Called when this object has been resized. More... | |
| virtual void | Selected (bool bValue, bool bSelectMultiple) |
| virtual void | SetSystemPointers (Simulator *lpSim, Structure *lpStructure, NeuralModule *lpModule, Node *lpNode, bool bVerify) |
| virtual float | SynchUpdateInterval () |
| This is how often we need to update this particular adapter. More... | |
| virtual void | SynchUpdateInterval (float fltVal) |
| Determines how often we need to update this particular adapter. More... | |
| virtual bool | SynchWithRobot () |
| Gets whether the m_bRobotAdpaterSynch flag applies to this adapter. More... | |
| virtual void | SynchWithRobot (bool bVal) |
| Determines whether the m_bRobotAdpaterSynch flag applies to this adapter. More... | |
| virtual void | TimeStepModified () |
| If the time step is modified then we need to recalculate the length of the delay buffer. More... | |
| virtual void | UpdateExtraData () |
| UpdateData is called during this body parts sim update call, and before any of its child updates because those children may need import information like this parts position. However, there are a number of pieces of information that are not critical to the part itself, but that a user may have asked for. I do not want to collect that info for every part if it is not needed. So instead, if a user asks for it then this part is added to a list on the simulation. After all parts have been updated for a simulation step then we loop through the list of just the necessary parts and call UpdateExtraData to collect this additional data. It is important that this be done after all parts have stepped becasue some of this data will only be correct at the end. An example of this is force applied to a part. Forces can be added by any child parts, so it is only at the end that these values are valid. More... | |
| virtual void | VisualSelectionModeChanged (int iNewMode) |
| Called when the visual selection mode changed in GUI. More... | |
| virtual void | WakeDynamics () |
| Public Member Functions inherited from AnimatSim::Node | |
| Node () | |
| Default constructor. More... | |
| virtual | ~Node () |
| Destructor. More... | |
| virtual void | Copy (CStdSerialize *lpSource) |
| virtual bool | Enabled () |
| Tells whether this node is enabled. More... | |
| virtual void | Enabled (bool bValue) |
| Enables the node. More... | |
| virtual void | SetSystemPointers (Simulator *lpSim, Structure *lpStructure, NeuralModule *lpModule, Node *lpNode, bool bVerify) |
| Sets the system pointers. More... | |
| virtual void | VerifySystemPointers () |
| Verify that system pointers have been set correctly. More... | |
| Public Member Functions inherited from AnimatSim::AnimatBase | |
| AnimatBase () | |
| Constructs an AnimatBase object. More... | |
| virtual | ~AnimatBase () |
| Destroys the AnimatBase object.. More... | |
| virtual long | CalculateSnapshotByteSize () |
| Calculates the snapshot byte size. More... | |
| virtual NeuralModule * | GetNeuralModule () |
| Gets the neural module. More... | |
| virtual Node * | GetNode () |
| Gets the node. More... | |
| virtual Simulator * | GetSimulator () |
| Gets the simulator pointer. More... | |
| virtual Structure * | GetStructure () |
| Gets the structure for this node. More... | |
| virtual bool | HasProperty (const std::string &strName) |
| Queries this object if it has a property with the given name. More... | |
| virtual std::string | ID () |
| Gets the unique GUID ID of this object. More... | |
| virtual void | ID (std::string strValue) |
| Sets the unique GUID ID of the object. More... | |
| virtual void | Load (StdUtils::CStdXml &oXml) |
| Loads the item using an XML data packet. More... | |
| virtual void | LoadKeyFrameSnapshot (byte *aryBytes, long &lIndex) |
| Loads a key frame snapshot. More... | |
| virtual std::string | Name () |
| Gets the name of this object. More... | |
| virtual void | Name (std::string strValue) |
| Sets the name of the object. Blank is acceptable. More... | |
| virtual AnimatPropertyType | PropertyType (const std::string &strName) |
| virtual void | ReInitialize () |
| Re-initialize this object. More... | |
| virtual void | Reset () |
| Resets this object. More... | |
| virtual void | RigidBodyAdded (std::string strID) |
| virtual void | RigidBodyRemoved (std::string strID) |
| virtual void | SaveKeyFrameSnapshot (byte *aryBytes, long &lIndex) |
| Saves a key frame snapshot. More... | |
| virtual bool | Selected () |
| Tells if this items is selected or not. More... | |
| virtual bool | SetData (const std::string &strDataType, const float fltValue, bool bThrowError=true) |
| Set a variable based on a string data type name. More... | |
| virtual bool | SetData (const std::string &strDataType, const long lValue, bool bThrowError=true) |
| Set a variable based on a string data type name. More... | |
| virtual void | SimStarting () |
| Called just before the simulation starts. More... | |
| virtual void | SimStopping () |
| Called just before the simulation stops. More... | |
| virtual std::string | Type () |
| returns the string type name of this object. More... | |
| virtual void | Type (std::string strValue) |
| Sets the class type for this object. More... | |
| Public Member Functions inherited from AnimatSim::Environment::MovableItem | |
| MovableItem (void) | |
| Default constructor. More... | |
| virtual | ~MovableItem (void) |
| Destructor. More... | |
| virtual CStdFPoint | AbsolutePosition () |
| Gets the absolute position of this body part. More... | |
| virtual void | AbsolutePosition (CStdFPoint &oPoint) |
| Sets the absolute position of this body part. (m_oAbsPosition) More... | |
| virtual void | AbsolutePosition (float fltX, float fltY, float fltZ) |
| Sets the absolute position of this body part. (m_oAbsPosition) More... | |
| virtual bool | AllowMouseManipulation () |
| Tells if a given part can be manipulated using the mouse and draggers. More... | |
| virtual bool | AllowRotateDragX () |
| Gets whether this body part can be rotated along the x-axis by the user with the drag handlers. More... | |
| virtual bool | AllowRotateDragY () |
| Gets whether this body part can be rotated along the y-axis by the user with the drag handlers. More... | |
| virtual bool | AllowRotateDragZ () |
| Gets whether this body part can be rotated along the z-axis by the user with the drag handlers. More... | |
| virtual bool | AllowTranslateDragX () |
| Gets whether this body part can be translated along the x-axis by the user with the drag handlers. More... | |
| virtual bool | AllowTranslateDragY () |
| Gets whether this body part can be translated along the y-axis by the user with the drag handlers. More... | |
| virtual bool | AllowTranslateDragZ () |
| Gets whether this body part can be translated along the z-axis by the user with the drag handlers. More... | |
| virtual float | Alpha () |
| Gets the current alpha. More... | |
| virtual void | Alpha (float fltAlpha) |
| Sets the current alpha. More... | |
| virtual CStdColor * | Ambient () |
| Gets the ambient color value. More... | |
| virtual void | Ambient (CStdColor &aryColor) |
| virtual void | Ambient (float *aryColor) |
| Sets the Ambient color. More... | |
| virtual void | Ambient (std::string strXml) |
| Loads the Ambient color from an XML data packet. More... | |
| virtual bool | CalculateLocalPosForWorldPos (float fltWorldX, float fltWorldY, float fltWorldZ, CStdFPoint &vLocalPos) |
| Calculates the local position values for matrix transform for the part to be in a specific world position. More... | |
| virtual IMovableItemCallback * | Callback () |
| Gets the callback interface pointer. This is an interface pointer to a callback class that allows us to notify the GUI of events that occur within the simulation. More... | |
| virtual void | Callback (IMovableItemCallback *lpCallback) |
| Sets the callback interface pointer. This is an interface pointer to a callback class that allows us to notify the GUI of events that occur within the simulation. More... | |
| virtual float | CollisionsAlpha () |
| Gets the collisions alpha. More... | |
| virtual void | CollisionsAlpha (float fltVal) |
| Sets the collisions alpha. More... | |
| virtual CStdColor * | Diffuse () |
| Gets the diffuse color. More... | |
| virtual void | Diffuse (CStdColor &aryColor) |
| virtual void | Diffuse (float *aryColor) |
| Sets the Diffuse color. More... | |
| virtual void | Diffuse (std::string strXml) |
| Loads the Diffuse color from an XML data packet. More... | |
| virtual BoundingBox | GetBoundingBox () |
| Gets the bounding box for this part. More... | |
| virtual float | GetBoundingRadius () |
| Gets the bounding radius of this part. More... | |
| virtual CStdFPoint | GetCurrentPosition () |
| Gets the current position of this part. More... | |
| virtual float | GraphicsAlpha () |
| Gets the graphics alpha. More... | |
| virtual void | GraphicsAlpha (float fltVal) |
| Sets the graphics alpha. More... | |
| virtual bool | IsSelected () |
| Query if this object is selected. More... | |
| virtual bool | IsVisible () |
| Query if this object is visible. More... | |
| virtual void | IsVisible (bool bVal) |
| Sets whether this part is visible or not. More... | |
| virtual float | JointsAlpha () |
| Gets the joints alpha. More... | |
| virtual void | JointsAlpha (float fltVal) |
| Sets the joints alpha. More... | |
| virtual std::string | LocalTransformationMatrixString () |
| Returns a string representation of the transformation matrix of this object. This is primarily used to save off the transform matrix into the project file. More... | |
| virtual void | OrientNewPart (float fltXPos, float fltYPos, float fltZPos, float fltXNorm, float fltYNorm, float fltZNorm) |
| Orients a new part based on where the parent was clicked and the normal of the surface face. More... | |
| RigidBody * | Parent () |
| Gets the parent RigidBody of this part. More... | |
| void | Parent (RigidBody *lpValue) |
| Sets the parent RigidBody of this part. More... | |
| virtual IPhysicsMovableItem * | PhysicsMovableItem () |
| Gets the physics body interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each box, sphere, etc.. More... | |
| virtual void | PhysicsMovableItem (IPhysicsMovableItem *lpBase) |
| Sets the physics body interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each box, sphere, etc.. More... | |
| virtual void | Position (float fltX, float fltY, float fltZ, bool bUseScaling=true, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the local position. (m_oPosition) More... | |
| virtual void | Position (std::string strXml, bool bUseScaling=true, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the local position. (m_oPosition). This method is primarily used by the GUI to reset the local position using an xml data packet. More... | |
| virtual float | ReceptiveFieldsAlpha () |
| Gets the receptive fields alpha. More... | |
| virtual void | ReceptiveFieldsAlpha (float fltVal) |
| Sets the receptive fields alpha. More... | |
| virtual CStdFPoint | ReportPosition () |
| Gets the reported local position. (m_oReportPosition). More... | |
| virtual void | ReportPosition (CStdFPoint &oPoint) |
| Sets the reported local position. (m_oReportPosition). More... | |
| virtual void | ReportPosition (float fltX, float fltY, float fltZ) |
| Sets the reported local position. (m_oReportPosition). More... | |
| virtual CStdFPoint | ReportRotation () |
| Gets the reported rotation of this part. (m_oReportRotation) More... | |
| virtual void | ReportRotation (CStdFPoint &oPoint) |
| Sets the reported rotation of this part. (m_oReportRotation) More... | |
| virtual void | ReportRotation (float fltX, float fltY, float fltZ) |
| Sets the reported rotation of this part. (m_oReportRotation) More... | |
| virtual CStdFPoint | ReportWorldPosition () |
| Gets the reported world position. (m_oReportWorldPosition) More... | |
| virtual void | ReportWorldPosition (CStdFPoint &oPoint) |
| Sets the reported world position (m_oReportWorldPosition) More... | |
| virtual void | ReportWorldPosition (float fltX, float fltY, float fltZ) |
| Sets the reported world position (m_oReportWorldPosition) More... | |
| virtual CStdFPoint | Rotation () |
| Gets the rotation of this body in radians. More... | |
| virtual void | Rotation (CStdFPoint &oPoint, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the rotation of this body in radians. (m_oRotation) More... | |
| virtual void | Rotation (float fltX, float fltY, float fltZ, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the rotation of this body in radians. (m_oRotation) More... | |
| virtual void | Rotation (std::string strXml, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the rotation of this body in radians. (m_oRotation). This method is primarily used by the GUI to reset the rotation using an xml data packet. More... | |
| virtual CStdFPoint | SelectedVertex () |
| Gets the relative position of the selected vertex. (m_vSelectedVertex) More... | |
| virtual void | SelectedVertex (CStdFPoint &vPoint, bool bFireChangeEvent=false, bool bUpdatePhysics=true) |
| Sets the relative position of the selected vertex. (m_vSelectedVertex) More... | |
| virtual void | SelectedVertex (float fltX, float fltY, float fltZ, bool bFireChangeEvent=false, bool bUpdatePhysics=true) |
| Sets the relative position of the selected vertex. (m_vSelectedVertex) More... | |
| virtual void | SetBoundingBox (int iIdx, float fltVal) |
| Sets one dimension of the bounding box. This does nothing for all parts except a mesh. More... | |
| virtual float | Shininess () |
| Gets the shininess. More... | |
| virtual void | Shininess (float fltVal) |
| Sets the shininess value. More... | |
| virtual float | SimulationAlpha () |
| Gets the simulation alpha. More... | |
| virtual void | SimulationAlpha (float fltVal) |
| Sets the simulation alpha. More... | |
| virtual CStdColor * | Specular () |
| Gets the specular color. More... | |
| virtual void | Specular (CStdColor &aryColor) |
| virtual void | Specular (float *aryColor) |
| Sets the Specular color. More... | |
| virtual void | Specular (std::string strXml) |
| Loads the Specular color from an XML data packet. More... | |
| virtual std::string | Texture () |
| Gets the texture filename. More... | |
| virtual void | Texture (std::string strValue) |
| Sets the Texture filename. More... | |
| virtual CStdFPoint | UpdateAbsolutePosition () |
| virtual void | UserDefinedDraggerRadius (float fltRadius) |
| User defined dragger radius. More... | |
| virtual float | UserDefinedDraggerRadius () |
| Gets the user defined dragger radius. More... | |
Static Public Member Functions | |
| static RigidBody * | CastToDerived (AnimatBase *lpBase) |
| Static Public Member Functions inherited from AnimatSim::Environment::BodyPart | |
| static BodyPart * | CastToDerived (AnimatBase *lpBase) |
| Static Public Member Functions inherited from AnimatSim::Node | |
| static Node * | CastToDerived (AnimatBase *lpBase) |
Protected Member Functions | |
| virtual void | AddContactSensor (std::string strXml) |
| Creates and adds a ContactSensor. More... | |
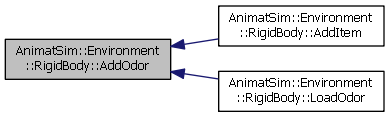
| virtual void | AddOdor (Odor *lpOdor) |
| Adds an odor source to this body part. More... | |
| virtual void | AddOdor (std::string strXml, bool bDoNotInit) |
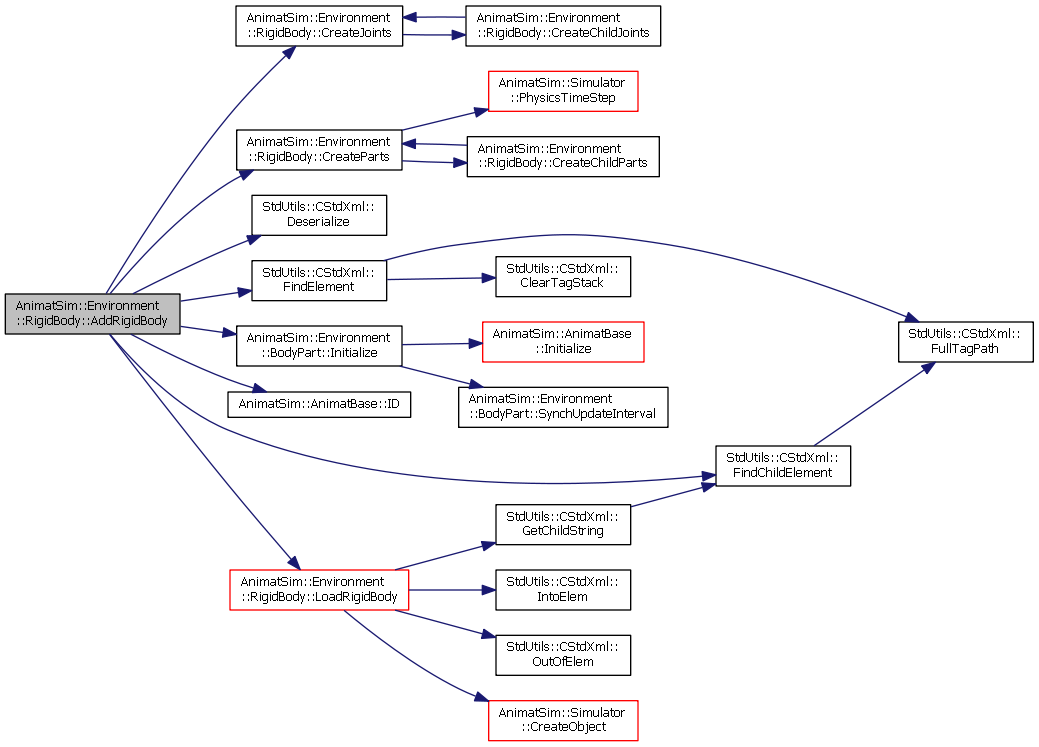
| virtual RigidBody * | AddRigidBody (std::string strXml) |
| Creates and adds a rigid body. More... | |
| virtual void | CenterOfMass (CStdFPoint &vPoint, bool bUseScaling, bool bPhysicsCallback) |
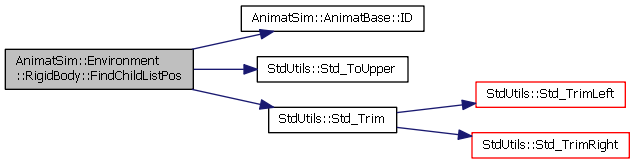
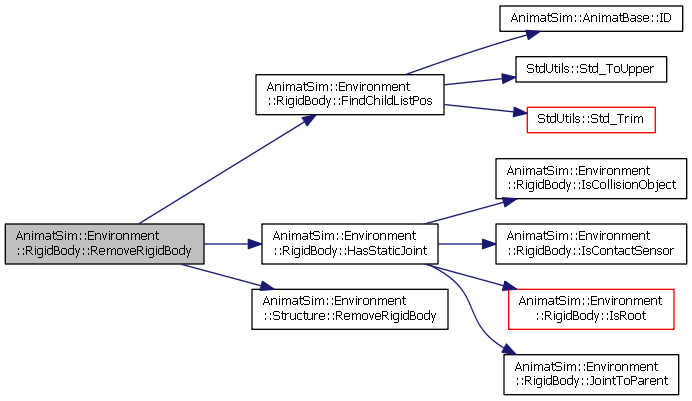
| virtual int | FindChildListPos (std::string strID, bool bThrowError=true) |
| Finds the array index for the child part with the specified ID. More... | |
| virtual void | Freeze (bool bVal, bool bPhysicsCallback) |
| virtual void | LoadContactSensor (CStdXml &oXml) |
| virtual Joint * | LoadJoint (CStdXml &oXml) |
| Loads a child joint. More... | |
| virtual Odor * | LoadOdor (CStdXml &oXml) |
| Loads an odor source. More... | |
| virtual void | LoadPosition (CStdXml &oXml) |
| Loads the items position. More... | |
| virtual RigidBody * | LoadRigidBody (CStdXml &oXml) |
| Loads a child rigid body. More... | |
| virtual void | Mass (float fltVal, bool bUseScaling, bool bPhysicsCallback) |
| virtual void | RemoveCollisionExclusions () |
| Called by the desctructor. It removes this object from all other collision exclusion lists. This prevents any attempt to reference this deleted object while looping through collision exclusions. More... | |
| virtual void | RemoveContactSensor (std::string strID, bool bThrowError=true) |
| Removes the ContactSensor. More... | |
| virtual void | RemoveOdor (std::string strID, bool bThrowError=true) |
| virtual void | RemoveRigidBody (std::string strID, bool bThrowError=true) |
| Removes the rigid body with the specified ID. More... | |
| Protected Member Functions inherited from AnimatSim::Environment::BodyPart | |
| virtual void | UpdateData () |
| Called to collect any body data for this part. More... | |
| Protected Member Functions inherited from AnimatSim::Environment::MovableItem | |
| virtual void | LoadRotation (CStdXml &oXml) |
| Loads the items rotation. More... | |
Protected Attributes | |
| CStdPtrArray< RigidBody > | m_aryChildParts |
| std::unordered_set< RigidBody * > | m_aryExcludeCollisionSet |
| This is the list of other parts that this part is excluded from colliding with. | |
| CStdPtrMap< std::string, Odor > | m_aryOdorSources |
| The array odor sources attached to this part. | |
| bool | m_bDisplayDebugCollisionGraphic |
| bool | m_bEnableFluids |
| true to enable fluid interactions. | |
| bool | m_bFoodSource |
| Tells if this body is considered a food source. | |
| bool | m_bFreeze |
| bool | m_bIsCollisionObject |
| This determines whether the object is a collision geometry object. | |
| bool | m_bIsContactSensor |
| bool | m_bIsStickyPart |
| bool | m_bUsesJoint |
| float | m_fltAngularVelocityDamping |
| The angular velocity damping for this part. | |
| float | m_fltBuoyancyScale |
| float | m_fltDensity |
| Uniform density for the rigid body. | |
| float | m_fltFoodEaten |
| Tells how much food is being eaten. | |
| float | m_fltFoodEnergyContent |
| The energy content of the food in calories. | |
| float | m_fltFoodQuantity |
| The quantity of food that this part contains. | |
| float | m_fltFoodQuantityInit |
| The initial food quantity to use when simulation is reset. | |
| float | m_fltFoodReplenishRate |
| The rate at which food is replenished. | |
| float | m_fltLinearVelocityDamping |
| The linear velocity damping for this body part. | |
| float | m_fltMagnus |
| The Magnus coefficient for the body. This is defaulted to zero because it almost always negligble for most body parts. | |
| float | m_fltMass |
| The mass of the object. | |
| float | m_fltMaxFoodQuantity |
| The maximum food quantity that this part can contain. | |
| float | m_fltMaxHydroForce |
| The maximum hyrdodynamic force that can be applied. | |
| float | m_fltMaxHydroTorque |
| The maximum hyrdodynamic torque that can be applied. | |
| float | m_fltReportDensity |
| The density value reported to the GUI. | |
| float | m_fltReportMass |
| The mass of the object to report to GUI. | |
| float | m_fltReportVolume |
| The volume of the object to report to GUI. | |
| float | m_fltStickyOn |
| If this is a suction part then this controls when stickness is on. | |
| float | m_fltSurfaceContactCount |
| float | m_fltVolume |
| The volume for the rigid body. | |
| long | m_lEatTime |
| Keeps track of how many time slices this part can eat. | |
| ContactSensor * | m_lpContactSensor |
| Joint * | m_lpJointToParent |
| RigidBody * | m_lpStickyChild |
| If we are doing a sticky lock then this is the child part that was locked on. | |
| std::string | m_strMaterialID |
| Identifier for the material type this part will use. | |
| CStdFPoint | m_vAngularDrag |
| This is the drag coefficients for the three axises for the body. | |
| CStdFPoint | m_vBuoyancyCenter |
| This is the relative position to the center of the buoyancy in the body. | |
| CStdFPoint | m_vCenterOfMass |
| CStdFPoint | m_vLinearDrag |
| This is the drag coefficients for the three axises for the body. | |
| Protected Attributes inherited from AnimatSim::Environment::BodyPart | |
| CStdArray< RobotPartInterface * > | m_aryRobotParts |
| Array of pointers to robot part interfaces connected to this body part. | |
| bool | m_bSynchWithRobot |
| float | m_fltSynchUpdateInterval |
| This is how often we need to update this particular adapter. | |
| int | m_iSynchCount |
| Keeps track of the last time we did a synch for the robot. | |
| int | m_iSynchUpdateInterval |
| The number of ticks between each call to update for this adapter till the next update time. | |
| IPhysicsBody * | m_lpPhysicsBody |
| Protected Attributes inherited from AnimatSim::Node | |
| bool | m_bInitEnabled |
| Keeps track of the enabled state at sim startup. | |
| float | m_fltEnabled |
| This is used for reporting the enabled state in a GetDataPointer call. | |
| Organism * | m_lpOrganism |
| The pointer to this node's organism. | |
| Protected Attributes inherited from AnimatSim::AnimatBase | |
| bool | m_bEnabled |
| Tells if this item is enabled or not. If it is not enabled then it is not run. | |
| bool | m_bSelected |
| Tells whether the object is selected or not. | |
| AnimatSim::Behavior::NeuralModule * | m_lpModule |
| The pointer to this items parentNeuralModule. If this is not relevant for this object then this is NULL. | |
| Node * | m_lpNode |
| The pointer to this items parent Node. If this is not relevant for this object then this is NULL. | |
| Simulator * | m_lpSim |
| The pointer to a Simulation. | |
| AnimatSim::Environment::Structure * | m_lpStructure |
| The pointer to this items parent Structure. If this is not relevant for this object then this is NULL. | |
| std::string | m_strID |
| The unique Id for this object. | |
| std::string | m_strName |
| The name for this object. | |
| std::string | m_strType |
| The type for this object. Examples are Box, Plane, Neuron, etc.. | |
| Protected Attributes inherited from AnimatSim::Environment::MovableItem | |
| bool | m_bIsSelected |
| Keeps track of whether this movable item has been selected or not. | |
| bool | m_bIsVisible |
| float | m_fltAlpha |
| The current alpha transparency for this body part. | |
| float | m_fltCollisionsAlpha |
| The alpha transparency used in the Collisions VisualSelectionMode. | |
| float | m_fltGraphicsAlpha |
| The alpha transparency used in the Graphics VisualSelectionMode. | |
| float | m_fltJointsAlpha |
| The alpha transparency used in the Joints VisualSelectionMode. | |
| float | m_fltReceptiveFieldsAlpha |
| The alpha transparency used in the Receptive Fields VisualSelectionMode. | |
| float | m_fltReportIsVisible |
| float | m_fltShininess |
| The shininess of the part. A value between 0 and 128. | |
| float | m_fltSimulationAlpha |
| The alpha transparency used in the Simulation VisualSelectionMode. | |
| float | m_fltUserDefinedDraggerRadius |
| User defined drag handle radius. If this is -1 then the user has not set the value and the default is used. | |
| IMovableItemCallback * | m_lpCallback |
| Simulator * | m_lpMovableSim |
| The pointer to a Simulation. | |
| RigidBody * | m_lpParent |
| IPhysicsMovableItem * | m_lpPhysicsMovableItem |
| CStdFPoint | m_oAbsPosition |
| CStdFPoint | m_oPosition |
| These are rotation and position coords relative to the parent if this is a body part. | |
| CStdFPoint | m_oReportPosition |
| This is used for reporting the position back to the GUI. It is the position scaled for distance units. | |
| CStdFPoint | m_oReportRotation |
| CStdFPoint | m_oReportWorldPosition |
| This is used for reporting the position back to the GUI. It is the world position scaled for distance units. | |
| CStdFPoint | m_oRotation |
| std::string | m_strTexture |
| An optional texture to apply to the rigid body. | |
| CStdColor | m_vAmbient |
| The ambient color to apply to this part. It is specified as red, green, blue, and alpha. | |
| CStdColor | m_vDiffuse |
| The diffuse color to apply to this part. It is specified as red, green, blue, and alpha. | |
| CStdFPoint | m_vSelectedVertex |
| The relative position of the selected vertex. | |
| CStdColor | m_vSpecular |
| The specular color to apply to this part. It is specified as red, green, blue, and alpha. | |
The base class for all of the basic rigid body type of objects.
This class provides the base functionality for a rigid body. Each structure/Organism is made up of a heirarchcal tree of rigid bodies that are connected by Joint objects. The base structure has a root rigid body. That root body has a list of child rigid bodies that are connected to the root through a joint. Each of those child bodies can then have other children connected to them and so on.
Each rigid body within a structure/organism has a unique string identifier that is specifed for it. Whenever you are attempting to find a given part through a function like Simulator::FindRigidBody it is this identifier that is used as the key in the search. This class also contains a number of parameters that are common for all rigid bodies. These include things like the colors of the object and the uniform density of the body. All rigid bodies have these properties.
This is a virtual base class and can not be directly created. You must override this class to provide specific functionality in order to create a real rigid body. For example, the Box and Cylinder are two examples of subclasses of a rigid body that add more parameters specific for their body type. Box has the x,y, and z widths for the box, whereas cylinder has the radius and height of the cylinder to create. The purpose of RigidBody and its subclasses like Box are to try and implement as much of the functionality as can be accomplished in this library, yet leave it flexible enough that a new physics engine could be easily swapped in for later use. This means that a lot of the mundane things like loading the data for the different rigid body and joint types is done for you automatically by the Body and Joint classes. But these classes can still not really implement all of the functionality necessary for the rigid body. The reason for this is that the overridable functions to create the actual implementation for those parts in your chosen physics engine must still be implemented. The two main functions related to that are CreateParts and CreateJoints. Since AnimatSim is generalized so that it is not tightly coupled to any one physics engine then that coupling must be done in the layer above this library where the chosen physics engine like Vortex is actually used.
Definition at line 66 of file RigidBody.h.
| AnimatSim::Environment::RigidBody::RigidBody | ( | ) |
Default constructor.
Definition at line 47 of file RigidBody.cpp.
References m_bDisplayDebugCollisionGraphic, m_bEnableFluids, m_bFoodSource, m_bFreeze, m_bIsCollisionObject, m_bIsContactSensor, m_bIsStickyPart, m_bUsesJoint, m_fltAngularVelocityDamping, m_fltBuoyancyScale, m_fltDensity, m_fltFoodEaten, m_fltFoodEnergyContent, m_fltFoodQuantity, m_fltFoodQuantityInit, m_fltFoodReplenishRate, m_fltLinearVelocityDamping, m_fltMagnus, m_fltMass, m_fltMaxFoodQuantity, m_fltMaxHydroForce, m_fltMaxHydroTorque, m_fltReportDensity, m_fltReportMass, m_fltReportVolume, m_fltStickyOn, m_fltSurfaceContactCount, m_lEatTime, m_lpContactSensor, m_lpJointToParent, AnimatSim::Environment::MovableItem::m_lpParent, m_lpStickyChild, AnimatSim::AnimatBase::m_lpStructure, and m_strMaterialID.
|
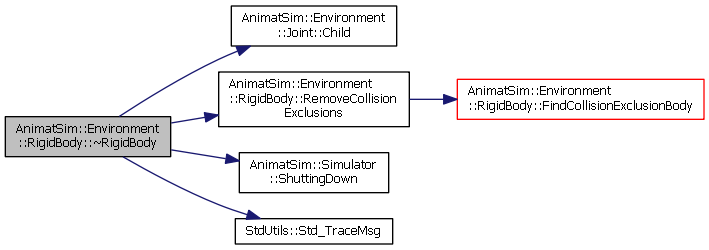
virtual |
Destructor.
Definition at line 97 of file RigidBody.cpp.
References AnimatSim::Environment::Joint::Child(), m_aryChildParts, m_lpContactSensor, m_lpJointToParent, AnimatSim::Environment::MovableItem::m_lpParent, AnimatSim::AnimatBase::m_lpSim, m_lpStickyChild, RemoveCollisionExclusions(), AnimatSim::Simulator::ShuttingDown(), and StdUtils::Std_TraceMsg().
Here is the call graph for this function:
|
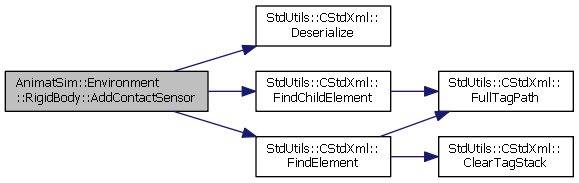
protectedvirtual |
Creates and adds a ContactSensor.
| strXml | The xml data packet for loading the body. |
Definition at line 2065 of file RigidBody.cpp.
References StdUtils::CStdXml::Deserialize(), StdUtils::CStdXml::FindChildElement(), StdUtils::CStdXml::FindElement(), m_lpContactSensor, and AnimatSim::Environment::BodyPart::m_lpPhysicsBody.
Referenced by AddItem().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Adds an external node input.
This is used by the adapter to add a new external value to this node. It is up to the node to interpret what that value means. For example, if it is a neuron then it can interpret it to be a current. This value is added to the current total so that multiple adapters can call this in a given time step. It is cleared out to zero at the beginning of the time step. You can now also specify which data you are adding to for this method call. This allows adapters to be setup to change multiple different variables in the system.
| iTargetDataType | The index of the target data type we are adding to. |
| fltInput | The new input. |
Implements AnimatSim::Node.
Reimplemented in AnimatSim::Environment::Bodies::Spring, AnimatSim::Environment::Bodies::MuscleBase, AnimatSim::Environment::Bodies::Stomach, and AnimatSim::Environment::Bodies::Mouth.
Definition at line 1618 of file RigidBody.cpp.
References m_fltStickyOn.
|
virtual |
Adds a world-coordinate based force vector to this body at a specified local body position.
| fltPx | The x position relative to the COM in local part coordinates. |
| fltPy | The y position relative to the COM in local part coordinates. |
| fltPz | The z position relative to the COM in local part coordinates. |
| fltFx | The x force in world coordinates. |
| fltFy | The y force in world coordinates. |
| fltFz | The z force in world coordinates. |
| bScaleUnits | If true then the force and value is scaled by the ScaleUnits, otherwise it is applied as provided. |
Definition at line 2461 of file RigidBody.cpp.
References AnimatSim::Environment::BodyPart::m_lpPhysicsBody.
Referenced by AnimatSim::ExternalStimuli::ForceStimulus::StepSimulation().
Here is the caller graph for this function:
|
virtual |
Adds a world-coordinate based force vector to this body at a specified world-coordinate body position.
| fltPx | The x position in world coordinates. |
| fltPy | The y position in world coordinates. |
| fltPz | The z position in world coordinates. |
| fltFx | The x force in world coordinates. |
| fltFy | The y force in world coordinates. |
| fltFz | The z force in world coordinates. |
| bScaleUnits | If true then the force and value is scaled by the ScaleUnits, otherwise it is applied as provided. |
Definition at line 2483 of file RigidBody.cpp.
References AnimatSim::Environment::BodyPart::m_lpPhysicsBody.
|
virtual |
Adds a new object to this parent.
Generic method to add a new child item to this parent by specifying a string item type descriptor and an xml packet that can be used to load in the new object. The GUI uses this method to create new items that were added with the user interface. The item type lets the method determine what type of item is being created, like synapse, neuron, body part, etc.. It then gets the modulename, classname, and type from the xml and calls CreateObject to create the appropriate type of object. Then it passes in the xml packet to the new objects load method and does any needed initialization and adds it to the parent.
| strItemType | String descriptor of the type of item that is being created. |
| strXml | XML packet that is used to create and load the new item. |
| bThrowError | If true then throw an error if there is a problem, otherwise return false. |
Reimplemented from AnimatSim::AnimatBase.
Definition at line 1907 of file RigidBody.cpp.
References AddContactSensor(), AddOdor(), AddRigidBody(), and StdUtils::Std_CheckString().
Here is the call graph for this function:
|
protectedvirtual |
Adds an odor source to this body part.
| [in,out] | lpOdor | The pointer to an odor source to add. |
Definition at line 2370 of file RigidBody.cpp.
References AnimatSim::AnimatBase::ID(), m_aryOdorSources, and StdUtils::CStdErrorInfo::m_strError.
Referenced by AddItem(), and LoadOdor().
Here is the call graph for this function: Here is the caller graph for this function:
|
protectedvirtual |
Creates and adds a rigid body.
| strXml | The xml data packet for loading the body. |
Definition at line 1973 of file RigidBody.cpp.
References CreateJoints(), CreateParts(), StdUtils::CStdXml::Deserialize(), StdUtils::CStdXml::FindChildElement(), StdUtils::CStdXml::FindElement(), AnimatSim::AnimatBase::ID(), AnimatSim::Environment::BodyPart::Initialize(), LoadRigidBody(), AnimatSim::Environment::BodyPart::m_lpPhysicsBody, and AnimatSim::AnimatBase::m_lpSim.
Referenced by AddItem().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Increments the surface contact count when this part collides with something in the virtual world.
If this item is setup to be a contact sensor then when the physics engine detects a collision between two objects it will provide this back to us. We then call this method to update the number of contacts that this object is undergoing. This value can then be used to detect whether, and how many, contacts are currently happening.
| [in,out] | lpContactedSurface | The pointer to the other contacted surface. |
Definition at line 1261 of file RigidBody.cpp.
References m_fltSurfaceContactCount.
|
virtual |
Adds a torque to this body about its center.
| fltTx | The torque about the x axis. |
| fltTy | The torque about the y axis. |
| fltTz | The torque about the z axis. |
| bScaleUnits | If true then the force and value is scaled by the ScaleUnits, otherwise it is applied as provided. |
Definition at line 2501 of file RigidBody.cpp.
References AnimatSim::Environment::BodyPart::m_lpPhysicsBody.
Referenced by AnimatSim::ExternalStimuli::ForceStimulus::StepSimulation().
Here is the caller graph for this function:
|
virtual |
Called after a simulation reset for some objects.
This method is only used by some objects because they need to do some processing after the simulation has been reset.
Reimplemented from AnimatSim::AnimatBase.
Reimplemented in AnimatSim::Environment::Bodies::LinearHillMuscle, AnimatSim::Environment::Bodies::LineBase, VortexAnimatSim::Environment::Bodies::VsLinearHillMuscle, BulletAnimatSim::Environment::Bodies::BlLinearHillMuscle, and RoboticsAnimatSim::Environment::Bodies::RbLinearHillMuscle.
Definition at line 1503 of file RigidBody.cpp.
References AnimatSim::Environment::Joint::AfterResetSimulation(), m_aryChildParts, and m_lpJointToParent.
Referenced by AnimatSim::Environment::Bodies::LineBase::AfterResetSimulation(), and AnimatSim::Environment::Structure::ResetSimulation().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Gets the angular drag coefficients for the three axises for the body.
Definition at line 1060 of file RigidBody.cpp.
References m_vAngularDrag.
Referenced by AngularDrag().
Here is the caller graph for this function:
|
virtual |
Sets the angular drag coefficients for the three axises for the body.
| [in,out] | oPoint | The new point to use to set the drag. |
Definition at line 1070 of file RigidBody.cpp.
References AnimatSim::Environment::BodyPart::m_lpPhysicsBody, and m_vAngularDrag.
|
virtual |
Sets the angular drag coefficients for the three axises for the body.
| fltX | The x coordinate. |
| fltY | The y coordinate. |
| fltZ | The z coordinate. |
Definition at line 1088 of file RigidBody.cpp.
References AngularDrag().
Here is the call graph for this function:
|
virtual |
Sets the angular drag coefficients for the three axises for the body. This method is primarily used by the GUI to reset the local position using an xml data packet.
| strXml | The xml string with the data to load in the position. |
Definition at line 1103 of file RigidBody.cpp.
References AngularDrag(), StdUtils::CStdXml::Deserialize(), StdUtils::CStdXml::FindChildElement(), StdUtils::CStdXml::FindElement(), and StdUtils::Std_LoadPoint().
Here is the call graph for this function:
|
virtual |
Gets the angular velocity damping.
Definition at line 829 of file RigidBody.cpp.
References m_fltAngularVelocityDamping.
|
virtual |
Sets the angular velocity damping.
| fltVal | The new value. |
| Value | must be zero or greater. |
Definition at line 840 of file RigidBody.cpp.
References AnimatSim::Simulator::DisplayMassUnits(), m_fltAngularVelocityDamping, m_fltLinearVelocityDamping, AnimatSim::Environment::BodyPart::m_lpPhysicsBody, AnimatSim::AnimatBase::m_lpSim, and StdUtils::Std_InValidRange().
Here is the call graph for this function:
|
virtual |
Gets the relative position to the center of the buoyancy in the body.
Definition at line 896 of file RigidBody.cpp.
References m_vBuoyancyCenter.
Referenced by BuoyancyCenter().
Here is the caller graph for this function:
|
virtual |
Sets the relative position to the center of the buoyancy in the body.
| [in,out] | oPoint | The new point to use to set the local position. |
| bUseScaling | If true then the position values that are passed in will be scaled by the unit scaling values. |
Definition at line 908 of file RigidBody.cpp.
References AnimatSim::Simulator::InverseDistanceUnits(), AnimatSim::Environment::MovableItem::m_lpMovableSim, AnimatSim::Environment::BodyPart::m_lpPhysicsBody, and m_vBuoyancyCenter.
Here is the call graph for this function:
|
virtual |
Sets the relative position to the center of the buoyancy in the body.
| fltX | The x coordinate. |
| fltY | The y coordinate. |
| fltZ | The z coordinate. |
| bUseScaling | If true then the position values that are passed in will be scaled by the unit scaling values. |
Definition at line 931 of file RigidBody.cpp.
References BuoyancyCenter().
Here is the call graph for this function:
|
virtual |
Sets tthe relative position to the center of the buoyancy in the body. This method is primarily used by the GUI to reset the local position using an xml data packet.
| strXml | The xml string with the data to load in the position. |
| bUseScaling | If true then the position values that are passed in will be scaled by the unit scaling values. |
Definition at line 948 of file RigidBody.cpp.
References BuoyancyCenter(), StdUtils::CStdXml::Deserialize(), StdUtils::CStdXml::FindChildElement(), StdUtils::CStdXml::FindElement(), and StdUtils::Std_LoadPoint().
Here is the call graph for this function:
|
virtual |
Gets the scale used to calculate the buoyancy value.
Definition at line 968 of file RigidBody.cpp.
References m_fltBuoyancyScale.
|
virtual |
Sets the scale used to calculate the buoyancy value.
| fltVal | The new scale value greater than or equal to 0. |
| If | value not greater than or equal to 0. |
Definition at line 979 of file RigidBody.cpp.
References m_fltBuoyancyScale, AnimatSim::Environment::BodyPart::m_lpPhysicsBody, and StdUtils::Std_IsAboveMin().
Here is the call graph for this function:
|
virtual |
Gets the user specified center of mass.
If this is (0, 0, 0) then the default COM is used for the part. This is only used if the user sets it to something.
Definition at line 169 of file RigidBody.cpp.
References m_vCenterOfMass.
Referenced by CenterOfMass().
Here is the caller graph for this function:
|
virtual |
Sets the user specified center of mass for this part. (m_vCenterOfMass). If COM is (0,0,0) then it is not used.
| [in,out] | oPoint | The point. |
Definition at line 216 of file RigidBody.cpp.
References CenterOfMass().
Here is the call graph for this function:
|
virtual |
Sets the center of mass position. (m_vCenterOfMass). If COM is (0,0,0) then it is not used.
| fltX | The x coordinate. |
| fltY | The y coordinate. |
| fltZ | The z coordinate. |
| bUseScaling | If true then the position values that are passed in will be scaled by the unit scaling values. |
Definition at line 245 of file RigidBody.cpp.
References CenterOfMass().
Here is the call graph for this function:
|
virtual |
Sets the center of mass position for the body. (m_vCenterOfMass). This method is primarily used by the GUI to reset the local position using an xml data packet. If COM is (0,0,0) then it is not used.
| strXml | The xml string with the data to load in the position. |
| bUseScaling | If true then the position values that are passed in will be scaled by the unit scaling values. |
Definition at line 262 of file RigidBody.cpp.
References CenterOfMass(), StdUtils::CStdXml::Deserialize(), StdUtils::CStdXml::FindChildElement(), StdUtils::CStdXml::FindElement(), and StdUtils::Std_LoadPoint().
Here is the call graph for this function:
|
virtual |
Gets the center of mass of this part with any static children added.
Definition at line 179 of file RigidBody.cpp.
References HasStaticChildren(), HasStaticJoint(), m_aryChildParts, m_vCenterOfMass, and Position().
Here is the call graph for this function:
|
virtual |
Gets the array of child parts.
Definition at line 283 of file RigidBody.cpp.
References m_aryChildParts.
|
virtual |
Loops through all the child parts of this rigid body and call CreateJoints.
This is called by CreateJoints method to recursively call CreateJoints for all children.
Definition at line 1585 of file RigidBody.cpp.
References CreateJoints(), and m_aryChildParts.
Referenced by CreateJoints().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Loops through all the child parts of this rigid body and call CreateParts.
This is called by CreateParts method to recursively call CreateParts for all children.
Definition at line 1548 of file RigidBody.cpp.
References CreateParts(), and m_aryChildParts.
Referenced by CreateParts().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Allows the rigid body to create its joints using the chosen physics engine.
This function can not be truly implemented in the Animat library. It must be implemented in the next layer sitting above it. The reason for this is that the Animat library was made to be generalized so it could work with a number of different physics engines. Therefore it is not tightly coupled with any one engine. This in turn means that we can not implement the code in this library neccessary to create a part or joint in the chosen engine. Several overridable functions have been provided that allow you to do this. The two that will always have to be overridden are the CreateParts and CreateJoints methods. CreateJoints makes the API calls to the physics engine to create the joint and constraints and motors. You should still call the base class method at the end of your overridden method so the rigid body can walk down the tree and create the joints for its children.
Reimplemented in AnimatSim::Environment::Bodies::LinearHillMuscle, AnimatSim::Environment::Bodies::LineBase, AnimatSim::Environment::Bodies::Sensor, VortexAnimatSim::Environment::Bodies::VsSpring, BulletAnimatSim::Environment::Bodies::BlTerrain, VortexAnimatSim::Environment::Bodies::VsBoxTest, VortexAnimatSim::Environment::Bodies::VsCone, VortexAnimatSim::Environment::Bodies::VsCylinder, VortexAnimatSim::Environment::Bodies::VsSphere, VortexAnimatSim::Environment::Bodies::VsBox, BulletAnimatSim::Environment::Bodies::BlBox, BulletAnimatSim::Environment::Bodies::BlMesh, VortexAnimatSim::Environment::Bodies::VsEllipsoid, BulletAnimatSim::Environment::Bodies::BlEllipsoid, VortexAnimatSim::Environment::Bodies::VsTerrain, VortexAnimatSim::Environment::Bodies::VsTorus, BulletAnimatSim::Environment::Bodies::BlCone, BulletAnimatSim::Environment::Bodies::BlTorus, VortexAnimatSim::Environment::Bodies::VsLinearHillMuscle, VortexAnimatSim::Environment::Bodies::VsLinearHillStretchReceptor, BulletAnimatSim::Environment::Bodies::BlCylinder, RoboticsAnimatSim::Environment::Bodies::RbBox, BulletAnimatSim::Environment::Bodies::BlSphere, VortexAnimatSim::Environment::Bodies::VsMesh, RoboticsAnimatSim::Environment::Bodies::RbEllipsoid, RoboticsAnimatSim::Environment::Bodies::RbTorus, RoboticsAnimatSim::Environment::Bodies::RbCone, BulletAnimatSim::Environment::Bodies::BlLinearHillMuscle, RoboticsAnimatSim::Environment::Bodies::RbCylinder, RoboticsAnimatSim::Environment::Bodies::RbLinearHillMuscle, BulletAnimatSim::Environment::Bodies::BlLinearHillStretchReceptor, RoboticsAnimatSim::Environment::Bodies::RbLinearHillStretchReceptor, RoboticsAnimatSim::Environment::Bodies::RbSphere, BulletAnimatSim::Environment::Bodies::BlSpring, RoboticsAnimatSim::Environment::Bodies::RbMesh, and RoboticsAnimatSim::Environment::Bodies::RbSpring.
Definition at line 1572 of file RigidBody.cpp.
References CreateChildJoints().
Referenced by AddRigidBody(), AnimatSim::Environment::Structure::AddRoot(), and CreateChildJoints().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Allows the rigid body to create its parts using the chosen physics engine.
This function can not be truly implemented in the Animat library. It must be implemented in the next layer sitting above it. The reason for this is that the Animat library was made to be generalized so it could work with a number of different physics engines. Therefore it is not tightly coupled with any one engine. This in turn means that we can not implement the code in this library neccessary to create a part or joint in the chosen engine. Several overridable functions have been provided that allow you to do this. The two that will always have to be overridden are the CreateParts and CreateJoints methods. CreateParts makes the API calls to the physics engine to create the collision models, graphics models and so on. You should still call the base class method at the end of your overridden method so the rigid body can walk down the tree and create the parts for its children.
Reimplemented in AnimatSim::Environment::Bodies::Spring, AnimatSim::Environment::Bodies::Stomach, AnimatSim::Environment::Bodies::LineBase, AnimatSim::Environment::Bodies::Sensor, BulletAnimatSim::Environment::Bodies::BlTerrain, OsgAnimatSim::Environment::Bodies::OsgMouth, OsgAnimatSim::Environment::Bodies::OsgOdorSensor, OsgAnimatSim::Environment::Bodies::OsgAttachment, VortexAnimatSim::Environment::Bodies::VsFluidPlane, BulletAnimatSim::Environment::Bodies::BlFluidPlane, VortexAnimatSim::Environment::Bodies::VsBoxTest, VortexAnimatSim::Environment::Bodies::VsCone, VortexAnimatSim::Environment::Bodies::VsCylinder, VortexAnimatSim::Environment::Bodies::VsSphere, VortexAnimatSim::Environment::Bodies::VsAttachment, VortexAnimatSim::Environment::Bodies::VsBox, BulletAnimatSim::Environment::Bodies::BlBox, VortexAnimatSim::Environment::Bodies::VsPlaneTest, BulletAnimatSim::Environment::Bodies::BlMesh, BulletAnimatSim::Environment::Bodies::BlPlane, VortexAnimatSim::Environment::Bodies::VsEllipsoid, BulletAnimatSim::Environment::Bodies::BlEllipsoid, VortexAnimatSim::Environment::Bodies::VsTerrain, VortexAnimatSim::Environment::Bodies::VsTorus, BulletAnimatSim::Environment::Bodies::BlCone, BulletAnimatSim::Environment::Bodies::BlTorus, VortexAnimatSim::Environment::Bodies::VsMouth, VortexAnimatSim::Environment::Bodies::VsOdorSensor, VortexAnimatSim::Environment::Bodies::VsPlane, BulletAnimatSim::Environment::Bodies::BlCylinder, RoboticsAnimatSim::Environment::Bodies::RbBox, BulletAnimatSim::Environment::Bodies::BlSphere, VortexAnimatSim::Environment::Bodies::VsMesh, RoboticsAnimatSim::Environment::Bodies::RbEllipsoid, RoboticsAnimatSim::Environment::Bodies::RbMouth, RoboticsAnimatSim::Environment::Bodies::RbOdorSensor, RoboticsAnimatSim::Environment::Bodies::RbTorus, RoboticsAnimatSim::Environment::Bodies::RbCone, RoboticsAnimatSim::Environment::Bodies::RbCylinder, RoboticsAnimatSim::Environment::Bodies::RbSphere, and RoboticsAnimatSim::Environment::Bodies::RbMesh.
Definition at line 1531 of file RigidBody.cpp.
References CreateChildParts(), m_bFoodSource, m_fltFoodReplenishRate, AnimatSim::AnimatBase::m_lpSim, and AnimatSim::Simulator::PhysicsTimeStep().
Referenced by AddRigidBody(), AnimatSim::Environment::Structure::AddRoot(), and CreateChildParts().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Gets the uniform density.
Definition at line 323 of file RigidBody.cpp.
References m_fltDensity.
|
virtual |
Sets the uniform density of this part.
| fltVal | The new density value. |
| Density | must be greater than zero. |
Definition at line 334 of file RigidBody.cpp.
References AnimatSim::Simulator::DenominatorDistanceUnits(), AnimatSim::Simulator::DisplayMassUnits(), m_fltDensity, m_fltReportDensity, AnimatSim::Environment::BodyPart::m_lpPhysicsBody, AnimatSim::AnimatBase::m_lpSim, and StdUtils::Std_IsAboveMin().
Here is the call graph for this function:
|
virtual |
Disables collision between the past-in object and this object.
This method disables collision responses between the rigid body being past in and this rigid body. This is a virtual method that should be overridden in the simulator system. You need to call physics engine API's to disable the collision responses between these two objects. This method does nothing by default.
| [in,out] | lpBody | The pointer to a body. |
Definition at line 1374 of file RigidBody.cpp.
References FindCollisionExclusionBody(), m_aryExcludeCollisionSet, and AnimatSim::Environment::BodyPart::m_lpPhysicsBody.
Referenced by AnimatSim::Environment::Structure::DisableCollision().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
This item is eating the specified amount of food.
| fltVal | The amount of food to eat. |
| lTimeSlice | The time slice during which the eating is occuring. |
Definition at line 1320 of file RigidBody.cpp.
References m_fltFoodEaten, m_fltFoodQuantity, and m_lEatTime.
Referenced by AnimatSim::Environment::Bodies::Mouth::StepSimulation().
Here is the caller graph for this function:
|
virtual |
Enables collision between the past-in object and this object.
This method enables collision responses between the rigid body being past in and this rigid body. This is a virtual method that should be overridden in the simulator system. You need to call physics engine API's to enable the collision responses between these two objects. This method does nothing by default.
| [in,out] | lpBody | The pointer to a body. |
Definition at line 1343 of file RigidBody.cpp.
References FindCollisionExclusionBody(), m_aryExcludeCollisionSet, and AnimatSim::Environment::BodyPart::m_lpPhysicsBody.
Referenced by AnimatSim::Environment::Structure::EnableCollision().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Query if this object has fluid interactions turned on.
Definition at line 1210 of file RigidBody.cpp.
References m_bEnableFluids.
|
virtual |
Sets whether this object has fluid interactions turned on.
| bVal | true to turn on, false to turn off. |
Definition at line 1220 of file RigidBody.cpp.
References m_bEnableFluids, and AnimatSim::Environment::BodyPart::m_lpPhysicsBody.
|
protectedvirtual |
Finds the array index for the child part with the specified ID.
| strID | ID of part to find |
| bThrowError | If true and ID is not found then it will throw an error, else return NULL |
| If | bThrowError is true and ID is not found. |
Definition at line 2042 of file RigidBody.cpp.
References AnimatSim::AnimatBase::ID(), m_aryChildParts, StdUtils::Std_ToUpper(), and StdUtils::Std_Trim().
Referenced by RemoveRigidBody().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Searches the exclusion collision list to see if the specified part is already present.
| lpBody | Body part to find in the exclusion list. |
| bThrowError | true to throw error if there is a problem. |
| If | bThrowError=True and no part is found it throws an exception. |
Definition at line 1404 of file RigidBody.cpp.
References AnimatSim::AnimatBase::ID(), and m_aryExcludeCollisionSet.
Referenced by DisableCollision(), EnableCollision(), and RemoveCollisionExclusions().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Gets the amount of food eaten.
Definition at line 705 of file RigidBody.cpp.
References m_fltFoodEaten.
|
virtual |
Sets the amount of food eaten.
| fltVal | The amount of food eaten. |
Definition at line 715 of file RigidBody.cpp.
References m_fltFoodEaten.
|
virtual |
Gets the food energy content.
Definition at line 749 of file RigidBody.cpp.
References m_fltFoodEnergyContent.
Referenced by AnimatSim::Environment::Bodies::Mouth::StepSimulation().
Here is the caller graph for this function:
|
virtual |
Sets the food energy content.
| fltVal | The new food energy content value. |
| Food | Quantity must be zero or greater. |
Definition at line 760 of file RigidBody.cpp.
References m_fltFoodEnergyContent, and StdUtils::Std_InValidRange().
Here is the call graph for this function:
|
virtual |
Gets the food quantity.
Definition at line 676 of file RigidBody.cpp.
References m_fltFoodQuantity.
Referenced by AnimatSim::Environment::Odor::Quantity(), and AnimatSim::Environment::Bodies::Mouth::StepSimulation().
Here is the caller graph for this function:
|
virtual |
Sets the Food quantity.
| fltVal | The new food quantity value. |
| Food | Quantity must be zero or greater. |
Definition at line 687 of file RigidBody.cpp.
References m_fltFoodQuantity, m_fltFoodQuantityInit, AnimatSim::AnimatBase::m_lpSim, AnimatSim::Simulator::SimRunning(), and StdUtils::Std_InValidRange().
Here is the call graph for this function:
|
virtual |
Gets the food replenish rate.
Definition at line 725 of file RigidBody.cpp.
References m_fltFoodReplenishRate.
|
virtual |
Sets the food replenish rate.
| fltVal | The new replenish rate. |
Definition at line 735 of file RigidBody.cpp.
References m_fltFoodReplenishRate, and StdUtils::Std_InValidRange().
Here is the call graph for this function:
|
virtual |
Tells if this part is frozen or not.
Specifies if the part should frozen in place to the world. If a rigid body is frozen then it is as if it is nailed in place and can not move. Gravity and and other forces will not act on it.
Reimplemented in BulletAnimatSim::Environment::Bodies::BlMesh.
Definition at line 413 of file RigidBody.cpp.
References m_bFreeze.
Referenced by Freeze().
Here is the caller graph for this function:
|
virtual |
Freezes.
Specifies if the part should frozen in place to the world. If a rigid body is frozen then it is as if it is nailed in place and can not move. Gravity and and other forces will not act on it.
| bVal | true to freeze. |
Definition at line 427 of file RigidBody.cpp.
References Freeze().
Here is the call graph for this function:
|
virtual |
Gets the receptive field contact sensor.
Definition at line 313 of file RigidBody.cpp.
References m_lpContactSensor.
|
virtual |
Gets the density of this part.
Definition at line 2555 of file RigidBody.cpp.
References AnimatSim::Simulator::DenominatorDistanceUnits(), AnimatSim::Simulator::DisplayMassUnits(), m_fltDensity, m_fltReportDensity, AnimatSim::Environment::BodyPart::m_lpPhysicsBody, and AnimatSim::AnimatBase::m_lpSim.
Here is the call graph for this function:
|
virtual |
Gets the mass of this part.
Definition at line 2537 of file RigidBody.cpp.
References AnimatSim::Simulator::DisplayMassUnits(), m_fltMass, m_fltReportMass, AnimatSim::Environment::BodyPart::m_lpPhysicsBody, and AnimatSim::AnimatBase::m_lpSim.
Here is the call graph for this function:
|
virtual |
Gets the mass of this part and all static children.
Definition at line 2575 of file RigidBody.cpp.
References HasStaticChildren(), m_fltMass, and StaticChildrenMass().
Here is the call graph for this function:
|
virtual |
Used to convert a string target data type into an integer index.
We do not want to be doing any string comparisons within the main simulation loop. To avoid this we need to convert the target data type into an index to use when AddExternalNodeInput is called so it knows to which input we are adding.
| strDataType | String descriptor of the target data we want. |
Reimplemented from AnimatSim::Node.
Definition at line 1599 of file RigidBody.cpp.
References StdUtils::Std_CheckString().
Here is the call graph for this function:
|
virtual |
Gets a velocity of this body at specified point in the body.
| x | The x coordinate. |
| y | The y coordinate. |
| z | The z coordinate. |
Definition at line 2519 of file RigidBody.cpp.
References AnimatSim::Environment::BodyPart::m_lpPhysicsBody.
|
virtual |
Gets the volume of this part.
Definition at line 2592 of file RigidBody.cpp.
References AnimatSim::Simulator::DistanceUnits(), m_fltDensity, m_fltReportVolume, AnimatSim::Environment::BodyPart::m_lpPhysicsBody, and AnimatSim::AnimatBase::m_lpSim.
Here is the call graph for this function:
|
virtual |
Query if this rigid body has any static children.
This looks through all of the immediate children of this part to see if they have a static joint. If they do it returns true, if not it returns false. It does not look beyond its immediate children because static parts cannot be nested. They must be placed on a non-static part.
Definition at line 607 of file RigidBody.cpp.
References HasStaticJoint(), and m_aryChildParts.
Referenced by CenterOfMassWithStaticChildren(), and GetMassValueWithStaticChildren().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Query if this object has a static joint.
Reimplemented in AnimatSim::Environment::Bodies::Stomach, AnimatSim::Environment::Bodies::Sensor, and AnimatSim::Environment::Bodies::LineBase.
Definition at line 587 of file RigidBody.cpp.
References IsCollisionObject(), IsContactSensor(), IsRoot(), and JointToParent().
Referenced by CenterOfMassWithStaticChildren(), HasStaticChildren(), RemoveRigidBody(), and StaticChildrenMass().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Query if this object is collision object.
Definition at line 468 of file RigidBody.cpp.
References m_bIsCollisionObject.
Referenced by HasStaticJoint(), and VisualSelectionType().
Here is the caller graph for this function:
|
virtual |
Sets whether this part is a collision object.
| bVal | true if collision object, false else. |
Definition at line 478 of file RigidBody.cpp.
References m_bIsCollisionObject.
|
virtual |
Query if this object is contact sensor.
Definition at line 448 of file RigidBody.cpp.
References m_bIsContactSensor.
Referenced by HasStaticJoint().
Here is the caller graph for this function:
|
virtual |
Sets whether this is a contact sensor.
| bVal | true if it is a contact sensor. |
Definition at line 458 of file RigidBody.cpp.
References m_bIsContactSensor.
|
virtual |
Query if this object is food source.
Definition at line 645 of file RigidBody.cpp.
References m_bFoodSource.
|
virtual |
Sets if this is a food source.
| bVal | true if food source, else false. |
Definition at line 655 of file RigidBody.cpp.
References m_bFoodSource, and AnimatSim::AnimatBase::m_lpSim.
|
virtual |
Query if this is the root rigid body of the structure or not.
Definition at line 571 of file RigidBody.cpp.
References AnimatSim::Environment::Structure::Body(), and AnimatSim::AnimatBase::m_lpStructure.
Referenced by HasStaticJoint(), LoadPosition(), and Position().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Query if this object acts as a sticky part. This only applies to contact sensors. If it is set to true and StickOn is true then when this part touches something else it will create a locked joint between those two parts. When StickOn goes to false then that joint will be removed. This allows the contact sensor to act as a kind of sticky pick up pad.
Definition at line 491 of file RigidBody.cpp.
References m_bIsStickyPart.
|
virtual |
Sets whether this part is a sticky part or not.
| bVal | true if sticky object, false else. |
Definition at line 501 of file RigidBody.cpp.
References m_bIsStickyPart, AnimatSim::Environment::BodyPart::m_lpPhysicsBody, and StickyOn().
Here is the call graph for this function:
|
virtual |
Gets the joint to parent.
Definition at line 293 of file RigidBody.cpp.
References m_lpJointToParent.
Referenced by HasStaticJoint().
Here is the caller graph for this function:
|
virtual |
Sets the joint to parent.
| [in,out] | lpValue | The pointer to the joint. |
Definition at line 303 of file RigidBody.cpp.
References m_lpJointToParent.
|
virtual |
Kills.
Called to kill the organism, nervous system, neurons, and body parts. All neural items are disabled to prevent any further neural activity, and all joints are disabled to allow free rotation, and all biomechancical components are disabled so they can no longer produce forces. This method is only relevant to these types of objects, but I am putting the definition in the base class because a variety of different types of classes all need this method and I want it consolidated. Those classes that do not need it do not have to call it or do anything when it is called.
| bState | true to state. |
Reimplemented from AnimatSim::Node.
Definition at line 1461 of file RigidBody.cpp.
References AnimatSim::Node::Kill(), m_aryChildParts, and m_lpJointToParent.
Referenced by AnimatSim::Environment::Organism::Kill().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Gets the linear drag coefficients for the three axises for the body.
Definition at line 997 of file RigidBody.cpp.
References m_vLinearDrag.
Referenced by LinearDrag().
Here is the caller graph for this function:
|
virtual |
Sets the linear drag coefficients for the three axises for the body.
| [in,out] | oPoint | The new point to use to set the drag. |
Definition at line 1007 of file RigidBody.cpp.
References AnimatSim::Environment::BodyPart::m_lpPhysicsBody, and m_vLinearDrag.
|
virtual |
Sets the linear drag coefficients for the three axises for the body.
| fltX | The x coordinate. |
| fltY | The y coordinate. |
| fltZ | The z coordinate. |
Definition at line 1025 of file RigidBody.cpp.
References LinearDrag().
Here is the call graph for this function:
|
virtual |
Sets the linear drag coefficients for the three axises for the body. This method is primarily used by the GUI to reset the local position using an xml data packet.
| strXml | The xml string with the data to load in the position. |
Definition at line 1040 of file RigidBody.cpp.
References StdUtils::CStdXml::Deserialize(), StdUtils::CStdXml::FindChildElement(), StdUtils::CStdXml::FindElement(), LinearDrag(), and StdUtils::Std_LoadPoint().
Here is the call graph for this function:
|
virtual |
Gets the linear velocity damping for this body part.
Definition at line 798 of file RigidBody.cpp.
References m_fltLinearVelocityDamping.
|
virtual |
Sets the Linear velocity damping.
| fltVal | The new value. |
| Value | must be zero or greater. |
Definition at line 809 of file RigidBody.cpp.
References AnimatSim::Simulator::DisplayMassUnits(), m_fltAngularVelocityDamping, m_fltLinearVelocityDamping, AnimatSim::Environment::BodyPart::m_lpPhysicsBody, AnimatSim::AnimatBase::m_lpSim, and StdUtils::Std_InValidRange().
Here is the call graph for this function:Loads a child joint.
| [in,out] | oXml | The xml data definition of the part to load. |
Definition at line 2319 of file RigidBody.cpp.
References AnimatSim::Environment::Structure::AddJoint(), AnimatSim::Environment::Joint::Child(), AnimatSim::Simulator::CreateObject(), StdUtils::CStdXml::GetChildString(), StdUtils::CStdXml::IntoChildElement(), m_lpJointToParent, AnimatSim::Environment::MovableItem::m_lpParent, AnimatSim::AnimatBase::m_lpSim, AnimatSim::AnimatBase::m_lpStructure, StdUtils::CStdXml::OutOfElem(), and AnimatSim::Environment::MovableItem::Parent().
Here is the call graph for this function:Loads an odor source.
| [in,out] | oXml | The xml data to use when loading the odor. |
Definition at line 2416 of file RigidBody.cpp.
References AddOdor(), AnimatSim::AnimatBase::m_lpSim, AnimatSim::AnimatBase::m_lpStructure, and AnimatSim::AnimatBase::SetSystemPointers().
Here is the call graph for this function:
|
protectedvirtual |
Loads the items position.
I have split this off into its own virtual class because some derived classes may need to override this function. For example, RigidBody needs to override it to not set the position if it is the root body.
| [in,out] | oXml | The xml. |
Reimplemented from AnimatSim::Environment::MovableItem.
Definition at line 2120 of file RigidBody.cpp.
References IsRoot(), AnimatSim::AnimatBase::m_lpStructure, AnimatSim::Environment::MovableItem::Position(), AnimatSim::Environment::Structure::Position(), Position(), and StdUtils::Std_LoadPoint().
Here is the call graph for this function:Loads a child rigid body.
| [in,out] | oXml | The xml data definition of the part to load. |
Definition at line 2268 of file RigidBody.cpp.
References AnimatSim::Environment::Structure::AddRigidBody(), AnimatSim::Simulator::CreateObject(), StdUtils::CStdXml::GetChildString(), StdUtils::CStdXml::IntoElem(), m_aryChildParts, AnimatSim::AnimatBase::m_lpSim, AnimatSim::AnimatBase::m_lpStructure, StdUtils::CStdXml::OutOfElem(), and AnimatSim::Environment::MovableItem::Parent().
Referenced by AddRigidBody().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Gets the Magnus coefficient for the body.
Definition at line 1181 of file RigidBody.cpp.
References m_fltMagnus.
|
virtual |
Sets the Magnus coefficient for the body.
| fltVal | The new Magnus value greater than or equal to 0. |
| If | value not greater than or equal to 0. |
Definition at line 1192 of file RigidBody.cpp.
References m_fltMagnus, AnimatSim::Environment::BodyPart::m_lpPhysicsBody, and StdUtils::Std_IsAboveMin().
Here is the call graph for this function:
|
virtual |
Gets the material ID for this part.
Each rigid body part can be associated with a specific type of material. For example, a material like wood, or concrete. The material specifies things like the frictional resistance between that part and parts of other materials. Each material is defined in the GUI and this is a unique ID string that specifies which one to use for this part.
Definition at line 865 of file RigidBody.cpp.
References m_strMaterialID.
|
virtual |
Sets the Material ID for this part.
Each rigid body part can be associated with a specific type of material. For example, a material like wood, or concrete. The material specifies things like the frictional resistance between that part and parts of other materials. Each material is defined in the GUI and this is a unique ID string that specifies which one to use for this part.
| strID | ID of the material to use. |
Definition at line 880 of file RigidBody.cpp.
References AnimatSim::Environment::BodyPart::m_lpPhysicsBody, m_strMaterialID, and StdUtils::Std_ToUpper().
Here is the call graph for this function:
|
virtual |
Gets the maximum food quantity.
Definition at line 773 of file RigidBody.cpp.
References m_fltMaxFoodQuantity.
|
virtual |
Sets the maximum Food quantity.
| fltVal | The new food quantity value. |
| Food | Quantity must be zero or greater. |
Definition at line 784 of file RigidBody.cpp.
References m_fltMaxFoodQuantity, and StdUtils::Std_InValidRange().
Here is the call graph for this function:
|
virtual |
Gets the maximum linear hydrodynamic force that can be applied to this part.
Definition at line 1123 of file RigidBody.cpp.
References m_fltMaxHydroForce.
|
virtual |
Sets the maximum linear hydrodynamic force that can be applied to this part.
| fltVal | The new value. |
| bUseScaling | true to use unit scaling. |
Definition at line 1134 of file RigidBody.cpp.
References AnimatSim::Simulator::InverseDistanceUnits(), AnimatSim::Simulator::InverseMassUnits(), m_fltMaxHydroForce, AnimatSim::AnimatBase::m_lpSim, and StdUtils::Std_IsAboveMin().
Here is the call graph for this function:
|
virtual |
Gets the maximum angular hydrodynamic torque that can be applied to this part.
Definition at line 1152 of file RigidBody.cpp.
References m_fltMaxHydroTorque.
|
virtual |
Sets the maximum angular hydrodynamic torque that can be applied to this part.
| fltVal | The new value. |
| bUseScaling | true to use unit scaling. |
Definition at line 1163 of file RigidBody.cpp.
References AnimatSim::Simulator::InverseDistanceUnits(), AnimatSim::Simulator::InverseMassUnits(), m_fltMaxHydroTorque, AnimatSim::AnimatBase::m_lpSim, and StdUtils::Std_IsAboveMin().
Here is the call graph for this function:
|
virtual |
Gets a parent that has collision geometry.
This is used for static joints. We need to add the new collision geometry to a parent part that actually has collision geometry as well.
Definition at line 1451 of file RigidBody.cpp.
References AnimatSim::Environment::MovableItem::m_lpParent, and ParentWithCollisionGeometry().
Referenced by ParentWithCollisionGeometry().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Gets the local position. (m_oPosition)
Reimplemented from AnimatSim::Environment::MovableItem.
Definition at line 131 of file RigidBody.cpp.
References IsRoot(), AnimatSim::AnimatBase::m_lpStructure, AnimatSim::Environment::MovableItem::Position(), and AnimatSim::Environment::Structure::Position().
Referenced by CenterOfMassWithStaticChildren(), VortexAnimatSim::Environment::Bodies::VsBoxTest::CreateParts(), and LoadPosition().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
For the RigidBody if it is the root then we are going to set the position of the structure.
Reimplemented from AnimatSim::Environment::MovableItem.
Reimplemented in AnimatSim::Environment::Bodies::LineBase, VortexAnimatSim::Environment::Bodies::VsFluidPlane, and BulletAnimatSim::Environment::Bodies::BlFluidPlane.
Definition at line 142 of file RigidBody.cpp.
References IsRoot(), AnimatSim::AnimatBase::m_lpStructure, AnimatSim::Environment::MovableItem::Position(), and AnimatSim::Environment::Structure::Position().
Here is the call graph for this function:
|
protectedvirtual |
Called by the desctructor. It removes this object from all other collision exclusion lists. This prevents any attempt to reference this deleted object while looping through collision exclusions.
Definition at line 1424 of file RigidBody.cpp.
References FindCollisionExclusionBody(), m_aryExcludeCollisionSet, and AnimatSim::Environment::BodyPart::m_lpPhysicsBody.
Referenced by ~RigidBody().
Here is the call graph for this function: Here is the caller graph for this function:
|
protectedvirtual |
Removes the ContactSensor.
| strID | ID of the contact senosr to remove |
| bThrowError | If true and ID is not found then it will throw an error. |
| If | bThrowError is true and ID is not found. |
Definition at line 2088 of file RigidBody.cpp.
References m_lpContactSensor, and AnimatSim::Environment::BodyPart::m_lpPhysicsBody.
Referenced by RemoveItem().
Here is the caller graph for this function:
|
virtual |
Removes a child item from this parent.
This is a generic method that is used to delete a child object from this parent. The GUI uses this method to remove objects from the simulation that have been deleted in the UI. The item type lets the method determine what type of item is being deleted, like synapse, neuron, body part, etc.. The ID is then used to delete that specific item.
| strItemType | String descriptor of the type of item that is being created. |
| strID | Unique ID of the item that will be removed. |
| bThrowError | If true then throw an error if there is a problem, otherwise return false. |
Reimplemented from AnimatSim::AnimatBase.
Definition at line 1936 of file RigidBody.cpp.
References RemoveContactSensor(), RemoveRigidBody(), and StdUtils::Std_CheckString().
Here is the call graph for this function:
|
protectedvirtual |
Removes the rigid body with the specified ID.
| strID | ID of the body to remove |
| bThrowError | If true and ID is not found then it will throw an error. |
| If | bThrowError is true and ID is not found. |
Definition at line 2010 of file RigidBody.cpp.
References FindChildListPos(), HasStaticJoint(), m_aryChildParts, AnimatSim::Environment::BodyPart::m_lpPhysicsBody, AnimatSim::AnimatBase::m_lpSim, AnimatSim::AnimatBase::m_lpStructure, and AnimatSim::Environment::Structure::RemoveRigidBody().
Referenced by RemoveItem().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Decrements the surface contact count when this part stops colliding with something in the virtual world.
If this item is setup to be a contact sensor then when the physics engine detects when a collision between two objects stops, and it will provide this back to us. We then call this method to update the number of contacts that this object is undergoing. This value can then be used to detect whether, and how many, contacts are currently happening.
| [in,out] | lpContactedSurface | If non-null, the pointer to a contacted surface. |
Definition at line 1280 of file RigidBody.cpp.
References m_fltSurfaceContactCount.
|
virtual |
Resets the simulation back to time 0.
This method calls the ResetSimulation method on all subitems in order to reset the simulation back to the beginning.
It is very important that the physcis of the rigid body is reset
before the joint and the child parts. The reason is that we want the position of this part to be rest first and then child parts because if we do not then when we do an UpdateFromNode on the physcis object it will be in the wrong location. We must reset the position from the root out, not leafs in.
Reimplemented from AnimatSim::Environment::BodyPart.
Reimplemented in AnimatSim::Environment::Bodies::LinearHillMuscle, AnimatSim::Environment::Bodies::Spring, AnimatSim::Environment::Bodies::MuscleBase, AnimatSim::Environment::Bodies::LinearHillStretchReceptor, AnimatSim::Environment::Bodies::Stomach, AnimatSim::Environment::Bodies::Mouth, VortexAnimatSim::Environment::Bodies::VsSpring, AnimatSim::Environment::Bodies::OdorSensor, VortexAnimatSim::Environment::Bodies::VsLinearHillMuscle, VortexAnimatSim::Environment::Bodies::VsLinearHillStretchReceptor, BulletAnimatSim::Environment::Bodies::BlLinearHillMuscle, RoboticsAnimatSim::Environment::Bodies::RbLinearHillMuscle, BulletAnimatSim::Environment::Bodies::BlLinearHillStretchReceptor, RoboticsAnimatSim::Environment::Bodies::RbLinearHillStretchReceptor, BulletAnimatSim::Environment::Bodies::BlSpring, and RoboticsAnimatSim::Environment::Bodies::RbSpring.
Definition at line 1473 of file RigidBody.cpp.
References m_aryChildParts, m_fltFoodEaten, m_fltFoodQuantity, m_fltFoodQuantityInit, m_fltSurfaceContactCount, m_lpJointToParent, AnimatSim::Environment::MovableItem::m_lpPhysicsMovableItem, AnimatSim::Environment::BodyPart::ResetSimulation(), AnimatSim::Environment::Joint::ResetSimulation(), and StickyOn().
Referenced by AnimatSim::Environment::Bodies::OdorSensor::ResetSimulation(), AnimatSim::Environment::Bodies::Mouth::ResetSimulation(), AnimatSim::Environment::Bodies::Stomach::ResetSimulation(), AnimatSim::Environment::Bodies::MuscleBase::ResetSimulation(), AnimatSim::Environment::Bodies::Spring::ResetSimulation(), and AnimatSim::Environment::Structure::ResetSimulation().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Direclty sets the surface contact count for when this part is contacting another rigid body part.
If this item is setup to be a contact sensor then when the physics engine detects when a collision between two objects stops, and it will provide this back to us. We then call this method to update the number of contacts that this object is undergoing. This value can then be used to detect whether, and how many, contacts are currently happening.
| [in] | iCount | The number of surface contacts. Must be 0 or larger. |
Definition at line 1300 of file RigidBody.cpp.
References m_fltSurfaceContactCount.
|
virtual |
Called just before the simulation pauses.
This method is called on each AnimatBase object when the simulation pauses. It allows it to perform any intialization prior to the pause of the simulation that is needed.
Reimplemented from AnimatSim::AnimatBase.
Definition at line 1592 of file RigidBody.cpp.
References m_bIsStickyPart, and AnimatSim::Environment::BodyPart::m_lpPhysicsBody.
|
virtual |
Gets the mass of all static children.
Definition at line 626 of file RigidBody.cpp.
References HasStaticJoint(), and m_aryChildParts.
Referenced by GetMassValueWithStaticChildren().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Step the simulation for this object.
This is called on an object each time it is stepped in the simulation. this is where its simulation code is processed. However, StepSimulation is not necessarily called every single time that the simulation as a whole is stepped. A good example of this is that neural modules can have different integration time steps. So a firing rate module may have a DT of 0.5 ms, while an integrate and fire model may have one of 0.1 ms. So the firing rate module would only get its StepSimulation method called every 5th time that the other module was called. This is all handed in the StepSimulation method of the Simulator and NervousSystem.
Reimplemented from AnimatSim::AnimatBase.
Reimplemented in AnimatSim::Environment::Bodies::Stomach, AnimatSim::Environment::Bodies::Mouth, VortexAnimatSim::Environment::Bodies::VsSpring, AnimatSim::Environment::Bodies::OdorSensor, VortexAnimatSim::Environment::Bodies::VsLinearHillMuscle, VortexAnimatSim::Environment::Bodies::VsLinearHillStretchReceptor, BulletAnimatSim::Environment::Bodies::BlLinearHillMuscle, RoboticsAnimatSim::Environment::Bodies::RbLinearHillMuscle, BulletAnimatSim::Environment::Bodies::BlLinearHillStretchReceptor, RoboticsAnimatSim::Environment::Bodies::RbLinearHillStretchReceptor, BulletAnimatSim::Environment::Bodies::BlSpring, and RoboticsAnimatSim::Environment::Bodies::RbSpring.
Definition at line 1630 of file RigidBody.cpp.
References m_aryChildParts, m_bEnableFluids, m_bFoodSource, m_fltFoodEaten, m_fltFoodQuantity, m_fltFoodReplenishRate, m_fltMaxFoodQuantity, m_lEatTime, m_lpJointToParent, AnimatSim::Environment::BodyPart::m_lpPhysicsBody, AnimatSim::AnimatBase::m_lpSim, AnimatSim::Simulator::SimulateHydrodynamics(), AnimatSim::AnimatBase::StepSimulation(), AnimatSim::Environment::Joint::StepSimulation(), AnimatSim::Simulator::TimeSlice(), and AnimatSim::Environment::BodyPart::UpdateData().
Referenced by AnimatSim::Environment::Structure::StepPhysicsEngine(), AnimatSim::Environment::Bodies::OdorSensor::StepSimulation(), and AnimatSim::Environment::Bodies::Mouth::StepSimulation().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Gets the child body part we are stuck to for a sticky part.
Definition at line 547 of file RigidBody.cpp.
References m_lpStickyChild.
|
virtual |
Sets the child part that we are stuck to if this is a sticky part.
| pointer | to stuck child part. |
Definition at line 557 of file RigidBody.cpp.
References m_bIsStickyPart, and m_lpStickyChild.
|
virtual |
Query if this stickyness is turned on or not. This only applies to contact sensors that also have IsStickyPart true.
Definition at line 520 of file RigidBody.cpp.
References m_fltStickyOn.
Referenced by IsStickyPart(), and ResetSimulation().
Here is the caller graph for this function:
|
virtual |
Sets whether this part has sticky on or not.
| bVal | true if sticky is on, false else. |
Definition at line 530 of file RigidBody.cpp.
References m_bIsStickyPart, and m_fltStickyOn.
|
virtual |
Gets the surface contact count.
Definition at line 1244 of file RigidBody.cpp.
References m_fltSurfaceContactCount.
|
virtual |
Updates the physics position from graphics.
This updates the position of the physcis node directly from the scenegraph position of the graphics node for this item, and then does the same for all child items.
Reimplemented from AnimatSim::Environment::BodyPart.
Definition at line 2100 of file RigidBody.cpp.
References AnimatSim::Environment::BodyPart::m_lpPhysicsBody.
Referenced by AnimatSim::Environment::Structure::ResetSimulation().
Here is the caller graph for this function:
|
virtual |
Gets the visual selection type for this part.
In the GUI the user can select several different types of visual selection modes When a user selects an object while in a given selection mode we need to be able to check each object that is in the path of the click to see if it should be selected. So we check the current selection mode with this VisualSelectionType property to see if they match. So if the current VisualSelectionMode is Joints, and this body part is a joint then it will have a matching VisualSelectionType property and we will no it should be selected, but if a rigid body was selected its VisualSelectionType will be different, so we will not select it.
Reimplemented from AnimatSim::Environment::MovableItem.
Definition at line 150 of file RigidBody.cpp.
References IsCollisionObject().
Here is the call graph for this function:
|
protected |
A list of child parts that are connected to this part through different joints.
Definition at line 98 of file RigidBody.h.
Referenced by AfterResetSimulation(), CenterOfMassWithStaticChildren(), ChildParts(), CreateChildJoints(), CreateChildParts(), VortexAnimatSim::Environment::Bodies::VsBoxTest::CreateParts(), FindChildListPos(), HasStaticChildren(), Kill(), LoadRigidBody(), RemoveRigidBody(), ResetSimulation(), StaticChildrenMass(), StepSimulation(), and ~RigidBody().
|
protected |
Determines whether a debug graphics of the rigid body is shown or not. This will show the exact placement of the rigid body in the physics engine.
Definition at line 200 of file RigidBody.h.
Referenced by RigidBody().
|
protected |
Specifies if the part should frozen in place to the world. If a rigid body is frozen then it is as if it is nailed in place and can not move. Gravity and and other forces will not act on it.
Definition at line 76 of file RigidBody.h.
Referenced by Freeze(), AnimatSim::Environment::Bodies::Plane::Plane(), RigidBody(), and AnimatSim::Environment::Bodies::Terrain::Terrain().
|
protected |
This determines whether or not this is a contact sensor. If this is true then this object does not take part in collisions and such, it is a contact sensor only.
Definition at line 111 of file RigidBody.h.
Referenced by IsContactSensor(), and RigidBody().
|
protected |
If a part is a contact sensor then we can also make it be a sticky part. If this is enabled and the m_fltStickyOn is 1 then it will stick to any parts that it comes into contact with. When m_fltStickyOn goes to 0 it will release those parts.
Definition at line 123 of file RigidBody.h.
Referenced by IsStickyPart(), RigidBody(), SimPausing(), StickyChild(), and StickyOn().
|
protected |
Some body parts like contact sensors and muscle attachments do not have joints. If not then we should not attempt to load them.
Definition at line 107 of file RigidBody.h.
Referenced by RigidBody(), and AnimatSim::Environment::Bodies::Sensor::Sensor().
|
protected |
This is a scale used to calculate the buoyancy value. It is a scale factor applied to the buoyancy force which accounts for the fact that a given volume might actually have holes or concavity in it which would affect the buoyancy force on the object.
Definition at line 178 of file RigidBody.h.
Referenced by BuoyancyScale(), and RigidBody().
|
protected |
This keeps track of the current number of surface contacts that are occuring for this contact sensor. This is only used for sensors.
Definition at line 118 of file RigidBody.h.
Referenced by AddSurfaceContact(), RemoveSurfaceContact(), ResetSimulation(), RigidBody(), SetSurfaceContactCount(), and SurfaceContactCount().
|
protected |
The pointer to a receptive field ContactSensor object. This is responsible for processing the receptive field contacts
Definition at line 133 of file RigidBody.h.
Referenced by AddContactSensor(), GetContactSensor(), RemoveContactSensor(), RigidBody(), and ~RigidBody().
|
protected |
A pointer to the joint that connects this rigid body to its parent. If this is the root object then this pointer is null. However, All child parts must be connected to their parent.
Definition at line 103 of file RigidBody.h.
Referenced by AfterResetSimulation(), RoboticsAnimatSim::Environment::Bodies::RbMesh::CreateJoints(), RoboticsAnimatSim::Environment::Bodies::RbSphere::CreateJoints(), RoboticsAnimatSim::Environment::Bodies::RbCylinder::CreateJoints(), RoboticsAnimatSim::Environment::Bodies::RbCone::CreateJoints(), RoboticsAnimatSim::Environment::Bodies::RbTorus::CreateJoints(), RoboticsAnimatSim::Environment::Bodies::RbEllipsoid::CreateJoints(), BulletAnimatSim::Environment::Bodies::BlSphere::CreateJoints(), VortexAnimatSim::Environment::Bodies::VsMesh::CreateJoints(), RoboticsAnimatSim::Environment::Bodies::RbBox::CreateJoints(), BulletAnimatSim::Environment::Bodies::BlCylinder::CreateJoints(), BulletAnimatSim::Environment::Bodies::BlTorus::CreateJoints(), BulletAnimatSim::Environment::Bodies::BlCone::CreateJoints(), BulletAnimatSim::Environment::Bodies::BlEllipsoid::CreateJoints(), VortexAnimatSim::Environment::Bodies::VsTerrain::CreateJoints(), VortexAnimatSim::Environment::Bodies::VsTorus::CreateJoints(), BulletAnimatSim::Environment::Bodies::BlMesh::CreateJoints(), VortexAnimatSim::Environment::Bodies::VsEllipsoid::CreateJoints(), BulletAnimatSim::Environment::Bodies::BlBox::CreateJoints(), VortexAnimatSim::Environment::Bodies::VsBox::CreateJoints(), VortexAnimatSim::Environment::Bodies::VsCylinder::CreateJoints(), VortexAnimatSim::Environment::Bodies::VsCone::CreateJoints(), VortexAnimatSim::Environment::Bodies::VsSphere::CreateJoints(), BulletAnimatSim::Environment::Bodies::BlTerrain::CreateJoints(), JointToParent(), Kill(), AnimatSim::Environment::Bodies::LineBase::LineBase(), LoadJoint(), ResetSimulation(), RigidBody(), AnimatSim::Environment::Bodies::Sensor::Sensor(), StepSimulation(), and ~RigidBody().
|
protected |
The center of mass of this body relative to the center of the object. If this is (0, 0, 0) then the default COM is used.
Definition at line 71 of file RigidBody.h.
Referenced by CenterOfMass(), and CenterOfMassWithStaticChildren().
 1.8.10
1.8.10