|
AnimatLab
2
Test
|
|
AnimatLab
2
Test
|
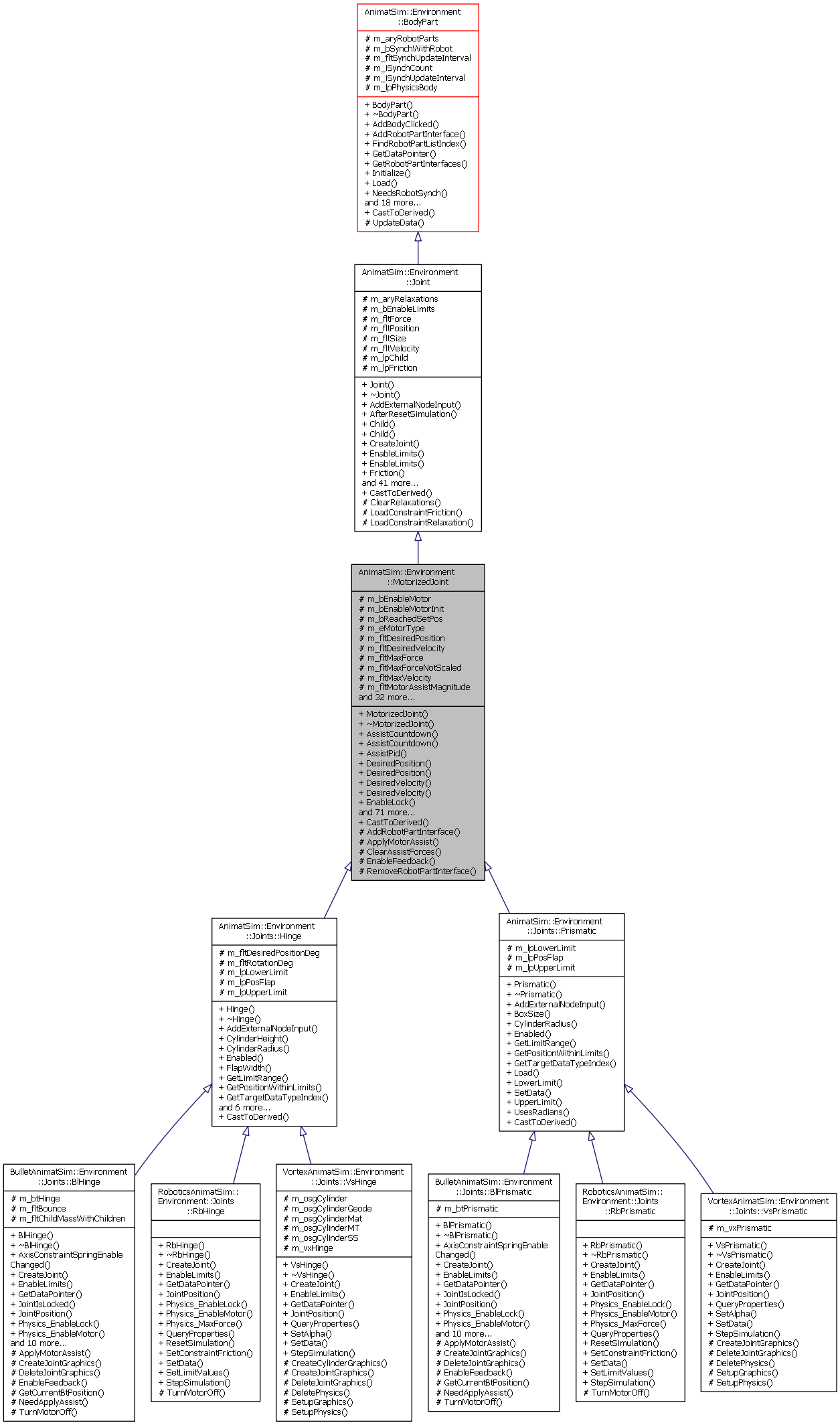
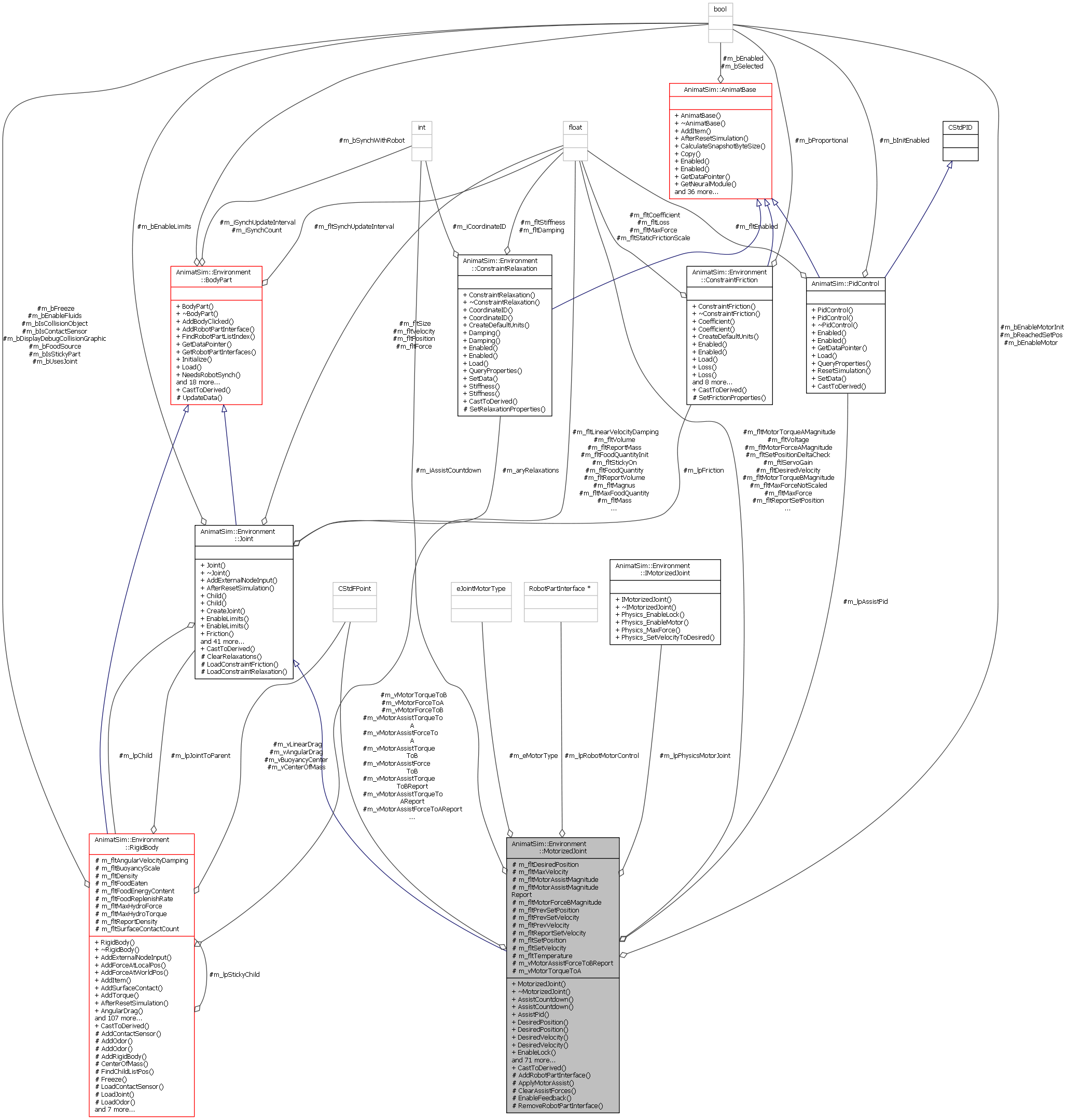
 Inheritance diagram for AnimatSim::Environment::MotorizedJoint: Collaboration diagram for AnimatSim::Environment::MotorizedJoint:
Inheritance diagram for AnimatSim::Environment::MotorizedJoint: Collaboration diagram for AnimatSim::Environment::MotorizedJoint:Public Member Functions | |
| virtual int | AssistCountdown () |
| Gets the assist countdown. More... | |
| virtual void | AssistCountdown (int iVal) |
| Sets the assist countdown. More... | |
| virtual CStdPID * | AssistPid () |
| Gets a pointer to the motor assist pid controller. More... | |
| virtual float | DesiredPosition () |
| Gets the desired Position. More... | |
| virtual void | DesiredPosition (float fltPosition) |
| Sets the desired Position. More... | |
| virtual float | DesiredVelocity () |
| Gets the desired velocity. More... | |
| virtual void | DesiredVelocity (float fltVelocity) |
| Sets the desired velocity. More... | |
| virtual void | EnableLock (bool bOn, float fltPosition, float fltMaxLockForce) |
| Enables/disables the motor lock. More... | |
| virtual bool | EnableMotor () |
| Tells if the motor is enabled. More... | |
| virtual void | EnableMotor (bool bVal) |
| Enables the motor. More... | |
| virtual float * | GetDataPointer (const std::string &strDataType) |
| virtual void | Initialize () |
| Initializes this object. More... | |
| virtual void | Load (CStdXml &oXml) |
| virtual void | MaxForce (float fltVal, bool bUseScaling=true) |
| Sets the Maximum torque. More... | |
| virtual float | MaxForce () |
| Gets the maximum torque. More... | |
| virtual float | MaxForceNotScaled () |
| Gets the maximum force/torque a motor can apply. This is the unscaled value. More... | |
| virtual float | MaxVelocity () |
| Gets the maximum velocity. More... | |
| virtual void | MaxVelocity (float fltVal, bool bUseScaling=true) |
| Sets the maximum velocity allowed by the motorized joint. More... | |
| virtual CStdFPoint | MotorAssistForceToA () |
| Gets the force vector that the motor assist is applying to body A. (scaled units). More... | |
| virtual void | MotorAssistForceToA (CStdFPoint &vVal) |
| Sets the force vector that the motor assist is applying to body A. (scaled units). More... | |
| virtual CStdFPoint | MotorAssistForceToAReport () |
| Gets the force vector that the motor assist is applying to body A. (un-scaled units). This is used for reporting purposes. More... | |
| virtual void | MotorAssistForceToAReport (CStdFPoint &vVal) |
| Sets the force vector that the motor assist is applying to body A. (un-scaled units). This is used for reporting purposes. More... | |
| virtual CStdFPoint | MotorAssistForceToB () |
| Gets the force vector that the motor assist is applying to body B. (scaled units). More... | |
| virtual void | MotorAssistForceToB (CStdFPoint &vVal) |
| Sets the force vector that the motor assist is applying to body B. (scaled units). More... | |
| virtual CStdFPoint | MotorAssistForceToBReport () |
| Gets the force vector that the motor assist is applying to body B. (scaled units). This is used for reporting purposes. More... | |
| virtual void | MotorAssistForceToBReport (CStdFPoint &vVal) |
| Sets the force vector that the motor assist is applying to body B. (un-scaled units). This is used for reporting purposes. More... | |
| virtual CStdFPoint | MotorAssistTorqueToA () |
| Gets the torque vector that the motor assist is applying to body A. (scaled units). More... | |
| virtual void | MotorAssistTorqueToA (CStdFPoint &vVal) |
| Sets the torque vector that the motor assist is applying to body A. (scaled units). More... | |
| virtual CStdFPoint | MotorAssistTorqueToAReport () |
| Gets the torque vector that the motor assist is applying to body A. (un-scaled units). This is used for reporting purposes. More... | |
| virtual void | MotorAssistTorqueToAReport (CStdFPoint &vVal) |
| Sets the torque vector that the motor assist is applying to body A. (un-scaled units). This is used for reporting purposes. More... | |
| virtual CStdFPoint | MotorAssistTorqueToB () |
| Gets the torque vector that the motor assist is applying to body B. (scaled units). More... | |
| virtual void | MotorAssistTorqueToB (CStdFPoint &vVal) |
| Sets the torque vector that the motor assist is applying to body B. (scaled units). More... | |
| virtual CStdFPoint | MotorAssistTorqueToBReport () |
| Gets the torque vector that the motor assist is applying to body B. (un-scaled units). This is used for reporting purposes. More... | |
| virtual void | MotorAssistTorqueToBReport (CStdFPoint &vVal) |
| Sets the torque vector that the motor assist is applying to body B. (un-scaled units). This is used for reporting purposes. More... | |
| virtual CStdFPoint | MotorForceToA () |
| Gets the force vector that the motor is applying to body A. (un-scaled units). This includes any motor assist within it. More... | |
| virtual void | MotorForceToA (CStdFPoint &vVal) |
| Sets the force vector that the motor is applying to body A. (un-scaled units). This includes any motor assist within it. More... | |
| virtual float | MotorForceToAMagnitude () |
| Gets the magnitude of the force that the motor is applying to body A. (scaled units). More... | |
| virtual void | MotorForceToAMagnitude (float fltVal) |
| Sets the magnitude of the force that the motor is applying to body A. (scaled units). More... | |
| virtual CStdFPoint | MotorForceToB () |
| Gets the force vector that the motor is applying to body B. (un-scaled units). This includes any motor assist within it. More... | |
| virtual void | MotorForceToB (CStdFPoint &vVal) |
| Sets the force vector that the motor is applying to body B. (un-scaled units). This includes any motor assist within it. More... | |
| virtual float | MotorForceToBMagnitude () |
| Gets the magnitude of the force that the motor is applying to body B. (scaled units). More... | |
| virtual void | MotorForceToBMagnitude (float fltVal) |
| Sets the magnitude of the force that the motor is applying to body B. (scaled units). More... | |
| virtual void | MotorInput (float fltInput) |
| Sets the desired velocity. More... | |
| virtual CStdFPoint | MotorTorqueToA () |
| Gets the torque vector that the motor is applying to body A. (un-scaled units). This includes any motor assist within it. More... | |
| virtual void | MotorTorqueToA (CStdFPoint &vVal) |
| Sets the torque vector that the motor is applying to body A. (un-scaled units). This includes any motor assist within it. More... | |
| virtual float | MotorTorqueToAMagnitude () |
| Gets the magnitude of the torque that the motor is applying to body A. (scaled units). More... | |
| virtual void | MotorTorqueToAMagnitude (float fltVal) |
| Sets the magnitude of the torque that the motor is applying to body A. (scaled units). More... | |
| virtual CStdFPoint | MotorTorqueToB () |
| Gets the torque vector that the motor is applying to body B. (un-scaled units). This includes any motor assist within it. More... | |
| virtual void | MotorTorqueToB (CStdFPoint &vVal) |
| Sets the torque vector that the motor is applying to body B. (un-scaled units). This includes any motor assist within it. More... | |
| virtual float | MotorTorqueToBMagnitude () |
| Gets the magnitude of the torque that the motor is applying to body B. (scaled units). More... | |
| virtual void | MotorTorqueToBMagnitude (float fltVal) |
| Sets the magnitude of the torque that the motor is applying to body B. (scaled units). More... | |
| virtual void | MotorType (eJointMotorType eServo) |
| Sets the type of motor to use for this joint. More... | |
| virtual eJointMotorType | MotorType () |
| Gets the type of motor to use for this joint. More... | |
| virtual IMotorizedJoint * | PhysicsMotorJoint () |
| Gets the physics body interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each joint.. More... | |
| virtual void | PhysicsMotorJoint (IMotorizedJoint *lpJoint) |
| Sets the physics motorized joint interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each joint.. More... | |
| virtual float | PrevSetPosition () |
| Gets the previous set position. More... | |
| virtual void | PrevSetPosition (float fltVal) |
| Sets the previous desired Position. More... | |
| virtual float | PrevSetVelocity () |
| Gets the previous set etVelocity. More... | |
| virtual void | PrevSetVelocity (float fltVal) |
| Sets the previous desired velocity. More... | |
| virtual float | PrevVelocity () |
| Sets the previous velocity that is actually used by the physics method. More... | |
| virtual void | PrevVelocity (float fltVal) |
| Sets the previous velocity that is actually used by the physics method. More... | |
| virtual void | QueryProperties (CStdPtrArray< TypeProperty > &aryProperties) |
| virtual bool | ReachedSetPosition () |
| Gets whether the servo motor has reached its target position. If it has then it switches to position only control until the user sets a new target position. More... | |
| virtual void | ReachedSetPosition (bool bVal) |
| whether the servo motor has reached its target position. More... | |
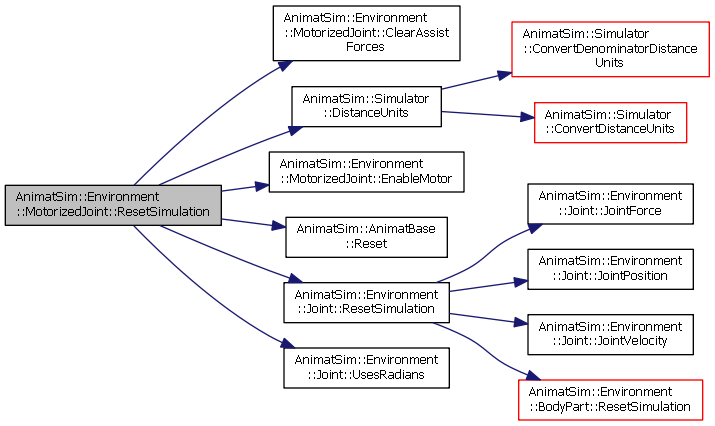
| virtual void | ResetSimulation () |
| Resets the simulation back to time 0. More... | |
| virtual void | RobotMotorControl (RobotPartInterface *lpPart) |
| virtual RobotPartInterface * | RobotMotorControl () |
| Gets the robot motor control interface. More... | |
| virtual void | ServoGain (float fltVal) |
| Sets the servo gain used to calculate the new velocity for maintaining a position with a servo motor. More... | |
| virtual float | ServoGain () |
| Gets the servo gain. More... | |
| virtual bool | SetData (const std::string &strDataType, const std::string &strValue, bool bThrowError=true) |
| virtual float | SetPosition () |
| Gets the position that is actually set using the physics method. More... | |
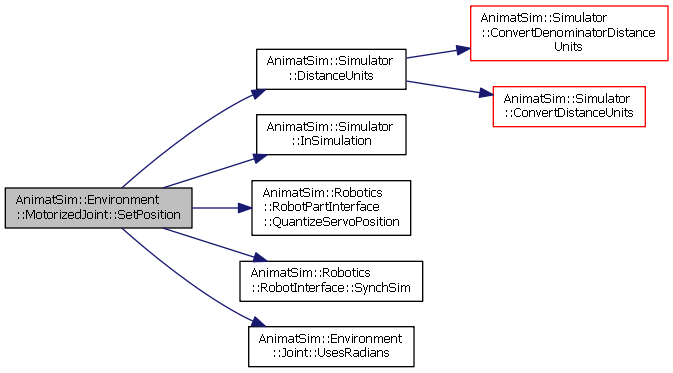
| virtual void | SetPosition (float fltVal) |
| Sets the Position that is actually set using the physics method. More... | |
| virtual float | SetVelocity () |
| Gets the velocity that is actually set using the physics method. More... | |
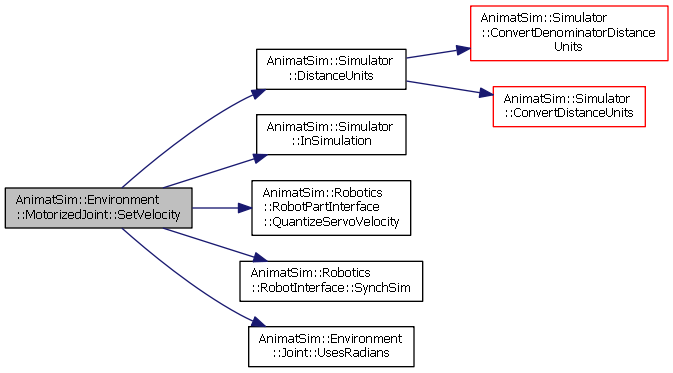
| virtual void | SetVelocity (float fltVal) |
| Sets the velocity that is actually set using the physics method. More... | |
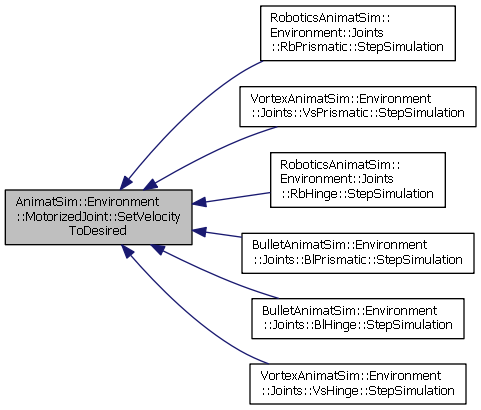
| virtual void | SetVelocityToDesired () |
| Sets the desired velocity to use for the motor. More... | |
| virtual float | Temperature () |
| Gets the motor temperature. More... | |
| virtual void | Temperature (float fltVal) |
| Sets the motor temperature. More... | |
| virtual float | Voltage () |
| Gets the motor voltage. More... | |
| virtual void | Voltage (float fltVal) |
| Sets the motor voltage. More... | |
| Public Member Functions inherited from AnimatSim::Environment::Joint | |
| Joint () | |
| Default constructor. More... | |
| virtual | ~Joint () |
| Destructor. More... | |
| virtual void | AddExternalNodeInput (int iTargetDataType, float fltInput) |
| Adds an external node input. More... | |
| virtual void | AfterResetSimulation () |
| Called after a simulation reset for some objects. More... | |
| virtual RigidBody * | Child () |
| Gets the child RigidBody part for this joint. More... | |
| virtual void | Child (RigidBody *lpValue) |
| Sets the Child RigidBody part for this joint. More... | |
| virtual void | CreateJoint () |
| Creates the joint. More... | |
| virtual bool | EnableLimits () |
| Tells if ConstraintLimits are enabled. More... | |
| virtual void | EnableLimits (bool bVal) |
| Sets whether ContrainLimits are enabled or not. More... | |
| virtual ConstraintFriction * | Friction () |
| Gets the pointer to the friction. More... | |
| virtual void | Friction (ConstraintFriction *lpFriction) |
| Sets the pointer to the friction. More... | |
| virtual void | Friction (std::string strXml) |
| Sets the friction. More... | |
| virtual float | GetLimitRange () |
| Gets the entire range of movement within the limits. If limits are not enabled then it returns -1. More... | |
| virtual float | GetPositionWithinLimits (float fltPos) |
| Gets a position value within the constraint limits. More... | |
| virtual float | JointForce () |
| Gets the joint force. More... | |
| virtual void | JointForce (float fltForce) |
| Sets the joint force. More... | |
| virtual float | JointPosition () |
| Gets the joint position. More... | |
| virtual void | JointPosition (float fltPos) |
| Sets the joint position. More... | |
| virtual float | JointVelocity () |
| Gets the joint velocity. More... | |
| virtual void | JointVelocity (float fltVel) |
| Sets the joint velocity. More... | |
| virtual ConstraintRelaxation * | Relaxation1 () |
| Gets the pointer to the primary axis displacement relaxation. More... | |
| virtual void | Relaxation1 (ConstraintRelaxation *lpRelax) |
| Sets the pointer to the primary axis displacement relaxation. More... | |
| virtual void | Relaxation1 (std::string strXml) |
| Sets the primary axis displacement relaxation. More... | |
| virtual ConstraintRelaxation * | Relaxation2 () |
| Gets the pointer to the secondary axis displacement relaxation. More... | |
| virtual void | Relaxation2 (ConstraintRelaxation *lpRelax) |
| Sets the pointer to the secondary axis displacement relaxation. More... | |
| virtual void | Relaxation2 (std::string strXml) |
| Sets the secondary axis displacement relaxation. More... | |
| virtual ConstraintRelaxation * | Relaxation3 () |
| Gets the pointer to the secondary axis displacement relaxation. More... | |
| virtual void | Relaxation3 (ConstraintRelaxation *lpRelax) |
| Sets the pointer to the third axis displacement relaxation. More... | |
| virtual void | Relaxation3 (std::string strXml) |
| Sets the third axis displacement relaxation. More... | |
| virtual ConstraintRelaxation * | Relaxation4 () |
| Gets the pointer to the secondary axis rotation relaxation. More... | |
| virtual void | Relaxation4 (ConstraintRelaxation *lpRelax) |
| Sets the pointer to the secondary axis rotation relaxation. More... | |
| virtual void | Relaxation4 (std::string strXml) |
| Sets the secondary axis rotation relaxation. More... | |
| virtual ConstraintRelaxation * | Relaxation5 () |
| Gets the pointer to the thirdary axis rotation relaxation. More... | |
| virtual void | Relaxation5 (ConstraintRelaxation *lpRelax) |
| Sets the pointer to the thirdary axis rotation relaxation. More... | |
| virtual void | Relaxation5 (std::string strXml) |
| Sets the thirdary axis rotation relaxation. More... | |
| virtual ConstraintRelaxation * | Relaxation6 () |
| Gets the pointer to the thirdary axis rotation relaxation. More... | |
| virtual void | Relaxation6 (ConstraintRelaxation *lpRelax) |
| Sets the pointer to the thirdary axis rotation relaxation. More... | |
| virtual void | Relaxation6 (std::string strXml) |
| Sets the thirdary axis rotation relaxation. More... | |
| virtual float | Size () |
| Gets the size of the graphical representation of this joint. More... | |
| virtual void | Size (float fltVal, bool bUseScaling=true) |
| Sets the size of the graphical representation of this joint. More... | |
| virtual void | StepSimulation () |
| Step the simulation for this object. More... | |
| virtual void | UpdatePhysicsPosFromGraphics () |
| Updates the physics position from graphics. More... | |
| virtual bool | UsesRadians () |
| Tells whether this joint uses radians or meters for its measurements. More... | |
| virtual int | VisualSelectionType () |
| Gets the visual selection type for this part. More... | |
| virtual void | WakeDynamics () |
| Public Member Functions inherited from AnimatSim::Environment::BodyPart | |
| BodyPart (void) | |
| Default constructor. More... | |
| virtual | ~BodyPart (void) |
| Destructor. More... | |
| virtual void | AddBodyClicked (float fltPosX, float fltPosY, float fltPosZ, float fltNormX, float fltNormY, float fltNormZ) |
| Called when the user clicks on this object while the AddBody mode is active. More... | |
| virtual int | FindRobotPartListIndex (std::string strID, bool bThrowError=true) |
| Finds the index of a robot part attached to this body part with the matching ID. More... | |
| virtual CStdArray< RobotPartInterface * > * | GetRobotPartInterfaces () |
| Gets a pointer to the roboto part interface associated with this body part. More... | |
| virtual bool | NeedsRobotSynch () |
| virtual IPhysicsBody * | PhysicsBody () |
| Gets the physics body interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each box, sphere, etc.. More... | |
| virtual void | PhysicsBody (IPhysicsBody *lpBody) |
| Sets the physics body interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each box, sphere, etc.. More... | |
| virtual void | Resize () |
| Called when this object has been resized. More... | |
| virtual void | Selected (bool bValue, bool bSelectMultiple) |
| virtual void | SetSystemPointers (Simulator *lpSim, Structure *lpStructure, NeuralModule *lpModule, Node *lpNode, bool bVerify) |
| virtual float | SynchUpdateInterval () |
| This is how often we need to update this particular adapter. More... | |
| virtual void | SynchUpdateInterval (float fltVal) |
| Determines how often we need to update this particular adapter. More... | |
| virtual bool | SynchWithRobot () |
| Gets whether the m_bRobotAdpaterSynch flag applies to this adapter. More... | |
| virtual void | SynchWithRobot (bool bVal) |
| Determines whether the m_bRobotAdpaterSynch flag applies to this adapter. More... | |
| virtual void | TimeStepModified () |
| If the time step is modified then we need to recalculate the length of the delay buffer. More... | |
| virtual void | UpdateExtraData () |
| UpdateData is called during this body parts sim update call, and before any of its child updates because those children may need import information like this parts position. However, there are a number of pieces of information that are not critical to the part itself, but that a user may have asked for. I do not want to collect that info for every part if it is not needed. So instead, if a user asks for it then this part is added to a list on the simulation. After all parts have been updated for a simulation step then we loop through the list of just the necessary parts and call UpdateExtraData to collect this additional data. It is important that this be done after all parts have stepped becasue some of this data will only be correct at the end. An example of this is force applied to a part. Forces can be added by any child parts, so it is only at the end that these values are valid. More... | |
| virtual void | VisualSelectionModeChanged (int iNewMode) |
| Called when the visual selection mode changed in GUI. More... | |
| Public Member Functions inherited from AnimatSim::Node | |
| Node () | |
| Default constructor. More... | |
| virtual | ~Node () |
| Destructor. More... | |
| virtual void | Copy (CStdSerialize *lpSource) |
| virtual bool | Enabled () |
| Tells whether this node is enabled. More... | |
| virtual void | Enabled (bool bValue) |
| Enables the node. More... | |
| virtual int | GetTargetDataTypeIndex (const std::string &strDataType) |
| Used to convert a string target data type into an integer index. More... | |
| virtual void | Kill (bool bState=true) |
| Kills. More... | |
| virtual void | SetSystemPointers (Simulator *lpSim, Structure *lpStructure, NeuralModule *lpModule, Node *lpNode, bool bVerify) |
| Sets the system pointers. More... | |
| virtual void | VerifySystemPointers () |
| Verify that system pointers have been set correctly. More... | |
| Public Member Functions inherited from AnimatSim::AnimatBase | |
| AnimatBase () | |
| Constructs an AnimatBase object. More... | |
| virtual | ~AnimatBase () |
| Destroys the AnimatBase object.. More... | |
| virtual bool | AddItem (const std::string &strItemType, const std::string &strXml, bool bThrowError=true, bool bDoNotInit=false) |
| Adds a new object to this parent. More... | |
| virtual long | CalculateSnapshotByteSize () |
| Calculates the snapshot byte size. More... | |
| virtual NeuralModule * | GetNeuralModule () |
| Gets the neural module. More... | |
| virtual Node * | GetNode () |
| Gets the node. More... | |
| virtual Simulator * | GetSimulator () |
| Gets the simulator pointer. More... | |
| virtual Structure * | GetStructure () |
| Gets the structure for this node. More... | |
| virtual bool | HasProperty (const std::string &strName) |
| Queries this object if it has a property with the given name. More... | |
| virtual std::string | ID () |
| Gets the unique GUID ID of this object. More... | |
| virtual void | ID (std::string strValue) |
| Sets the unique GUID ID of the object. More... | |
| virtual void | Load (StdUtils::CStdXml &oXml) |
| Loads the item using an XML data packet. More... | |
| virtual void | LoadKeyFrameSnapshot (byte *aryBytes, long &lIndex) |
| Loads a key frame snapshot. More... | |
| virtual std::string | Name () |
| Gets the name of this object. More... | |
| virtual void | Name (std::string strValue) |
| Sets the name of the object. Blank is acceptable. More... | |
| virtual AnimatPropertyType | PropertyType (const std::string &strName) |
| virtual void | ReInitialize () |
| Re-initialize this object. More... | |
| virtual bool | RemoveItem (const std::string &strItemType, const std::string &strID, bool bThrowError=true) |
| Removes a child item from this parent. More... | |
| virtual void | Reset () |
| Resets this object. More... | |
| virtual void | RigidBodyAdded (std::string strID) |
| virtual void | RigidBodyRemoved (std::string strID) |
| virtual void | SaveKeyFrameSnapshot (byte *aryBytes, long &lIndex) |
| Saves a key frame snapshot. More... | |
| virtual bool | Selected () |
| Tells if this items is selected or not. More... | |
| virtual bool | SetData (const std::string &strDataType, const float fltValue, bool bThrowError=true) |
| Set a variable based on a string data type name. More... | |
| virtual bool | SetData (const std::string &strDataType, const long lValue, bool bThrowError=true) |
| Set a variable based on a string data type name. More... | |
| virtual void | SimPausing () |
| Called just before the simulation pauses. More... | |
| virtual void | SimStarting () |
| Called just before the simulation starts. More... | |
| virtual void | SimStopping () |
| Called just before the simulation stops. More... | |
| virtual std::string | Type () |
| returns the string type name of this object. More... | |
| virtual void | Type (std::string strValue) |
| Sets the class type for this object. More... | |
| Public Member Functions inherited from AnimatSim::Environment::MovableItem | |
| MovableItem (void) | |
| Default constructor. More... | |
| virtual | ~MovableItem (void) |
| Destructor. More... | |
| virtual CStdFPoint | AbsolutePosition () |
| Gets the absolute position of this body part. More... | |
| virtual void | AbsolutePosition (CStdFPoint &oPoint) |
| Sets the absolute position of this body part. (m_oAbsPosition) More... | |
| virtual void | AbsolutePosition (float fltX, float fltY, float fltZ) |
| Sets the absolute position of this body part. (m_oAbsPosition) More... | |
| virtual bool | AllowMouseManipulation () |
| Tells if a given part can be manipulated using the mouse and draggers. More... | |
| virtual bool | AllowRotateDragX () |
| Gets whether this body part can be rotated along the x-axis by the user with the drag handlers. More... | |
| virtual bool | AllowRotateDragY () |
| Gets whether this body part can be rotated along the y-axis by the user with the drag handlers. More... | |
| virtual bool | AllowRotateDragZ () |
| Gets whether this body part can be rotated along the z-axis by the user with the drag handlers. More... | |
| virtual bool | AllowTranslateDragX () |
| Gets whether this body part can be translated along the x-axis by the user with the drag handlers. More... | |
| virtual bool | AllowTranslateDragY () |
| Gets whether this body part can be translated along the y-axis by the user with the drag handlers. More... | |
| virtual bool | AllowTranslateDragZ () |
| Gets whether this body part can be translated along the z-axis by the user with the drag handlers. More... | |
| virtual float | Alpha () |
| Gets the current alpha. More... | |
| virtual void | Alpha (float fltAlpha) |
| Sets the current alpha. More... | |
| virtual CStdColor * | Ambient () |
| Gets the ambient color value. More... | |
| virtual void | Ambient (CStdColor &aryColor) |
| virtual void | Ambient (float *aryColor) |
| Sets the Ambient color. More... | |
| virtual void | Ambient (std::string strXml) |
| Loads the Ambient color from an XML data packet. More... | |
| virtual bool | CalculateLocalPosForWorldPos (float fltWorldX, float fltWorldY, float fltWorldZ, CStdFPoint &vLocalPos) |
| Calculates the local position values for matrix transform for the part to be in a specific world position. More... | |
| virtual IMovableItemCallback * | Callback () |
| Gets the callback interface pointer. This is an interface pointer to a callback class that allows us to notify the GUI of events that occur within the simulation. More... | |
| virtual void | Callback (IMovableItemCallback *lpCallback) |
| Sets the callback interface pointer. This is an interface pointer to a callback class that allows us to notify the GUI of events that occur within the simulation. More... | |
| virtual float | CollisionsAlpha () |
| Gets the collisions alpha. More... | |
| virtual void | CollisionsAlpha (float fltVal) |
| Sets the collisions alpha. More... | |
| virtual CStdColor * | Diffuse () |
| Gets the diffuse color. More... | |
| virtual void | Diffuse (CStdColor &aryColor) |
| virtual void | Diffuse (float *aryColor) |
| Sets the Diffuse color. More... | |
| virtual void | Diffuse (std::string strXml) |
| Loads the Diffuse color from an XML data packet. More... | |
| virtual BoundingBox | GetBoundingBox () |
| Gets the bounding box for this part. More... | |
| virtual float | GetBoundingRadius () |
| Gets the bounding radius of this part. More... | |
| virtual CStdFPoint | GetCurrentPosition () |
| Gets the current position of this part. More... | |
| virtual float | GraphicsAlpha () |
| Gets the graphics alpha. More... | |
| virtual void | GraphicsAlpha (float fltVal) |
| Sets the graphics alpha. More... | |
| virtual bool | IsSelected () |
| Query if this object is selected. More... | |
| virtual bool | IsVisible () |
| Query if this object is visible. More... | |
| virtual void | IsVisible (bool bVal) |
| Sets whether this part is visible or not. More... | |
| virtual float | JointsAlpha () |
| Gets the joints alpha. More... | |
| virtual void | JointsAlpha (float fltVal) |
| Sets the joints alpha. More... | |
| virtual std::string | LocalTransformationMatrixString () |
| Returns a string representation of the transformation matrix of this object. This is primarily used to save off the transform matrix into the project file. More... | |
| virtual void | OrientNewPart (float fltXPos, float fltYPos, float fltZPos, float fltXNorm, float fltYNorm, float fltZNorm) |
| Orients a new part based on where the parent was clicked and the normal of the surface face. More... | |
| RigidBody * | Parent () |
| Gets the parent RigidBody of this part. More... | |
| void | Parent (RigidBody *lpValue) |
| Sets the parent RigidBody of this part. More... | |
| virtual IPhysicsMovableItem * | PhysicsMovableItem () |
| Gets the physics body interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each box, sphere, etc.. More... | |
| virtual void | PhysicsMovableItem (IPhysicsMovableItem *lpBase) |
| Sets the physics body interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each box, sphere, etc.. More... | |
| virtual CStdFPoint | Position () |
| Gets the local position. (m_oPosition) More... | |
| virtual void | Position (CStdFPoint &oPoint, bool bUseScaling=true, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the local position. (m_oPosition) More... | |
| virtual void | Position (float fltX, float fltY, float fltZ, bool bUseScaling=true, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the local position. (m_oPosition) More... | |
| virtual void | Position (std::string strXml, bool bUseScaling=true, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the local position. (m_oPosition). This method is primarily used by the GUI to reset the local position using an xml data packet. More... | |
| virtual float | ReceptiveFieldsAlpha () |
| Gets the receptive fields alpha. More... | |
| virtual void | ReceptiveFieldsAlpha (float fltVal) |
| Sets the receptive fields alpha. More... | |
| virtual CStdFPoint | ReportPosition () |
| Gets the reported local position. (m_oReportPosition). More... | |
| virtual void | ReportPosition (CStdFPoint &oPoint) |
| Sets the reported local position. (m_oReportPosition). More... | |
| virtual void | ReportPosition (float fltX, float fltY, float fltZ) |
| Sets the reported local position. (m_oReportPosition). More... | |
| virtual CStdFPoint | ReportRotation () |
| Gets the reported rotation of this part. (m_oReportRotation) More... | |
| virtual void | ReportRotation (CStdFPoint &oPoint) |
| Sets the reported rotation of this part. (m_oReportRotation) More... | |
| virtual void | ReportRotation (float fltX, float fltY, float fltZ) |
| Sets the reported rotation of this part. (m_oReportRotation) More... | |
| virtual CStdFPoint | ReportWorldPosition () |
| Gets the reported world position. (m_oReportWorldPosition) More... | |
| virtual void | ReportWorldPosition (CStdFPoint &oPoint) |
| Sets the reported world position (m_oReportWorldPosition) More... | |
| virtual void | ReportWorldPosition (float fltX, float fltY, float fltZ) |
| Sets the reported world position (m_oReportWorldPosition) More... | |
| virtual CStdFPoint | Rotation () |
| Gets the rotation of this body in radians. More... | |
| virtual void | Rotation (CStdFPoint &oPoint, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the rotation of this body in radians. (m_oRotation) More... | |
| virtual void | Rotation (float fltX, float fltY, float fltZ, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the rotation of this body in radians. (m_oRotation) More... | |
| virtual void | Rotation (std::string strXml, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the rotation of this body in radians. (m_oRotation). This method is primarily used by the GUI to reset the rotation using an xml data packet. More... | |
| virtual CStdFPoint | SelectedVertex () |
| Gets the relative position of the selected vertex. (m_vSelectedVertex) More... | |
| virtual void | SelectedVertex (CStdFPoint &vPoint, bool bFireChangeEvent=false, bool bUpdatePhysics=true) |
| Sets the relative position of the selected vertex. (m_vSelectedVertex) More... | |
| virtual void | SelectedVertex (float fltX, float fltY, float fltZ, bool bFireChangeEvent=false, bool bUpdatePhysics=true) |
| Sets the relative position of the selected vertex. (m_vSelectedVertex) More... | |
| virtual void | SetBoundingBox (int iIdx, float fltVal) |
| Sets one dimension of the bounding box. This does nothing for all parts except a mesh. More... | |
| virtual float | Shininess () |
| Gets the shininess. More... | |
| virtual void | Shininess (float fltVal) |
| Sets the shininess value. More... | |
| virtual float | SimulationAlpha () |
| Gets the simulation alpha. More... | |
| virtual void | SimulationAlpha (float fltVal) |
| Sets the simulation alpha. More... | |
| virtual CStdColor * | Specular () |
| Gets the specular color. More... | |
| virtual void | Specular (CStdColor &aryColor) |
| virtual void | Specular (float *aryColor) |
| Sets the Specular color. More... | |
| virtual void | Specular (std::string strXml) |
| Loads the Specular color from an XML data packet. More... | |
| virtual std::string | Texture () |
| Gets the texture filename. More... | |
| virtual void | Texture (std::string strValue) |
| Sets the Texture filename. More... | |
| virtual CStdFPoint | UpdateAbsolutePosition () |
| virtual void | UserDefinedDraggerRadius (float fltRadius) |
| User defined dragger radius. More... | |
| virtual float | UserDefinedDraggerRadius () |
| Gets the user defined dragger radius. More... | |
Static Public Member Functions | |
| static MotorizedJoint * | CastToDerived (AnimatBase *lpBase) |
| Static Public Member Functions inherited from AnimatSim::Environment::Joint | |
| static Joint * | CastToDerived (AnimatBase *lpBase) |
| Static Public Member Functions inherited from AnimatSim::Environment::BodyPart | |
| static BodyPart * | CastToDerived (AnimatBase *lpBase) |
| Static Public Member Functions inherited from AnimatSim::Node | |
| static Node * | CastToDerived (AnimatBase *lpBase) |
Protected Member Functions | |
| virtual void | AddRobotPartInterface (RobotPartInterface *lpPart) |
| virtual void | ApplyMotorAssist () |
| Applies the motor assist. More... | |
| virtual void | ClearAssistForces () |
| Clears the assist forces. More... | |
| virtual void | EnableFeedback () |
| Enables joint feedback. More... | |
| virtual void | RemoveRobotPartInterface (RobotPartInterface *lpPart) |
| Protected Member Functions inherited from AnimatSim::Environment::Joint | |
| virtual void | ClearRelaxations () |
| Clears the relaxation pointers. More... | |
| virtual ConstraintFriction * | LoadConstraintFriction (CStdXml &oXml) |
| Loads constraint Friction object. More... | |
| virtual ConstraintRelaxation * | LoadConstraintRelaxation (CStdXml &oXml, std::string strName) |
| Loads constraint relaxation object. More... | |
| Protected Member Functions inherited from AnimatSim::Environment::BodyPart | |
| virtual void | UpdateData () |
| Called to collect any body data for this part. More... | |
| Protected Member Functions inherited from AnimatSim::Environment::MovableItem | |
| virtual void | LoadPosition (CStdXml &oXml) |
| Loads the items position. More... | |
| virtual void | LoadRotation (CStdXml &oXml) |
| Loads the items rotation. More... | |
Protected Attributes | |
| bool | m_bEnableMotor |
| If true then the motor for this joint is enabled. | |
| bool | m_bEnableMotorInit |
| bool | m_bReachedSetPos |
| eJointMotorType | m_eMotorType |
| Determines the type of motor control this joint uses. The default is velocity controlled, but it can be position controlled, or both position and velocity controlled. | |
| float | m_fltDesiredPosition |
| float | m_fltDesiredVelocity |
| float | m_fltMaxForce |
| float | m_fltMaxForceNotScaled |
| The un=scaled maximum force. | |
| float | m_fltMaxVelocity |
| float | m_fltMotorAssistMagnitude |
| The motor assist Force magnitude. | |
| float | m_fltMotorAssistMagnitudeReport |
| The reportable motor assist Force magnitude. | |
| float | m_fltMotorForceAMagnitude |
| The magnitude of the motor Force being applied to body A. (scaled units) | |
| float | m_fltMotorForceBMagnitude |
| The magnitude of the motor Force being applied to body B. (scaled units) | |
| float | m_fltMotorTorqueAMagnitude |
| The magnitude of the motor torque being applied to body A. (scaled units) | |
| float | m_fltMotorTorqueBMagnitude |
| The magnitude of the motor torque being applied to body B. (scaled units) | |
| float | m_fltPrevSetPosition |
| float | m_fltPrevSetVelocity |
| The previous velocity set for the motorized joint in the last time step. | |
| float | m_fltPrevVelocity |
| float | m_fltReportSetPosition |
| This is the variable that is reported to AnimatLab on what the set position was. | |
| float | m_fltReportSetVelocity |
| This is the variable that is reported to AnimatLab on what the set veloicty was. | |
| float | m_fltSetPosition |
| float | m_fltSetPositionDeltaCheck |
| Used to check whether the set position has changed. | |
| float | m_fltSetVelocity |
| float | m_fltTemperature |
| float | m_fltVoltage |
| float | m_ftlServoGain |
| The gain of the servo motor. | |
| int | m_iAssistCountdown |
| PidControl * | m_lpAssistPid |
| The PID controller for the motor assist system. | |
| IMotorizedJoint * | m_lpPhysicsMotorJoint |
| The pointer to the physics joint instance. | |
| RobotPartInterface * | m_lpRobotMotorControl |
| The RobotPartInterface responsible for motor control for this motorized joint. | |
| CStdFPoint | m_vMotorAssistForceToA |
| Force vector that the motor assist is applying to body A. (scaled units). | |
| CStdFPoint | m_vMotorAssistForceToAReport |
| Force vector that the motor assist is applying to body A. (un-scaled units). | |
| CStdFPoint | m_vMotorAssistForceToB |
| Force vector that the motor assist is applying to body B. (scaled units). | |
| CStdFPoint | m_vMotorAssistForceToBReport |
| Force vector that the motor assist is applying to body B. (un-scaled units). | |
| CStdFPoint | m_vMotorAssistTorqueToA |
| Torque vector that the motor assist is applying to body A. (scaled units). | |
| CStdFPoint | m_vMotorAssistTorqueToAReport |
| Torque vector that the motor assist is applying to body A. (un-scaled units). | |
| CStdFPoint | m_vMotorAssistTorqueToB |
| Torque vector that the motor assist is applying to body B. (scaled units). | |
| CStdFPoint | m_vMotorAssistTorqueToBReport |
| Torque vector that the motor assist is applying to body B. (un-scaled units). | |
| CStdFPoint | m_vMotorForceToA |
| CStdFPoint | m_vMotorForceToB |
| CStdFPoint | m_vMotorTorqueToA |
| CStdFPoint | m_vMotorTorqueToB |
| Protected Attributes inherited from AnimatSim::Environment::Joint | |
| ConstraintRelaxation * | m_aryRelaxations [6] |
| The relaxations for the constraints. | |
| bool | m_bEnableLimits |
| If true then any ConstraintLimits for this joint are enabled. | |
| float | m_fltForce |
| The current force being applied to the joint by the motor. | |
| float | m_fltPosition |
| float | m_fltSize |
| Scales the size of the graphics for this joint. | |
| float | m_fltVelocity |
| RigidBody * | m_lpChild |
| The child rigid body for this joint. | |
| ConstraintFriction * | m_lpFriction |
| The friction for this joint. | |
| Protected Attributes inherited from AnimatSim::Environment::BodyPart | |
| CStdArray< RobotPartInterface * > | m_aryRobotParts |
| Array of pointers to robot part interfaces connected to this body part. | |
| bool | m_bSynchWithRobot |
| float | m_fltSynchUpdateInterval |
| This is how often we need to update this particular adapter. | |
| int | m_iSynchCount |
| Keeps track of the last time we did a synch for the robot. | |
| int | m_iSynchUpdateInterval |
| The number of ticks between each call to update for this adapter till the next update time. | |
| IPhysicsBody * | m_lpPhysicsBody |
| Protected Attributes inherited from AnimatSim::Node | |
| bool | m_bInitEnabled |
| Keeps track of the enabled state at sim startup. | |
| float | m_fltEnabled |
| This is used for reporting the enabled state in a GetDataPointer call. | |
| Organism * | m_lpOrganism |
| The pointer to this node's organism. | |
| Protected Attributes inherited from AnimatSim::AnimatBase | |
| bool | m_bEnabled |
| Tells if this item is enabled or not. If it is not enabled then it is not run. | |
| bool | m_bSelected |
| Tells whether the object is selected or not. | |
| AnimatSim::Behavior::NeuralModule * | m_lpModule |
| The pointer to this items parentNeuralModule. If this is not relevant for this object then this is NULL. | |
| Node * | m_lpNode |
| The pointer to this items parent Node. If this is not relevant for this object then this is NULL. | |
| Simulator * | m_lpSim |
| The pointer to a Simulation. | |
| AnimatSim::Environment::Structure * | m_lpStructure |
| The pointer to this items parent Structure. If this is not relevant for this object then this is NULL. | |
| std::string | m_strID |
| The unique Id for this object. | |
| std::string | m_strName |
| The name for this object. | |
| std::string | m_strType |
| The type for this object. Examples are Box, Plane, Neuron, etc.. | |
| Protected Attributes inherited from AnimatSim::Environment::MovableItem | |
| bool | m_bIsSelected |
| Keeps track of whether this movable item has been selected or not. | |
| bool | m_bIsVisible |
| float | m_fltAlpha |
| The current alpha transparency for this body part. | |
| float | m_fltCollisionsAlpha |
| The alpha transparency used in the Collisions VisualSelectionMode. | |
| float | m_fltGraphicsAlpha |
| The alpha transparency used in the Graphics VisualSelectionMode. | |
| float | m_fltJointsAlpha |
| The alpha transparency used in the Joints VisualSelectionMode. | |
| float | m_fltReceptiveFieldsAlpha |
| The alpha transparency used in the Receptive Fields VisualSelectionMode. | |
| float | m_fltReportIsVisible |
| float | m_fltShininess |
| The shininess of the part. A value between 0 and 128. | |
| float | m_fltSimulationAlpha |
| The alpha transparency used in the Simulation VisualSelectionMode. | |
| float | m_fltUserDefinedDraggerRadius |
| User defined drag handle radius. If this is -1 then the user has not set the value and the default is used. | |
| IMovableItemCallback * | m_lpCallback |
| Simulator * | m_lpMovableSim |
| The pointer to a Simulation. | |
| RigidBody * | m_lpParent |
| IPhysicsMovableItem * | m_lpPhysicsMovableItem |
| CStdFPoint | m_oAbsPosition |
| CStdFPoint | m_oPosition |
| These are rotation and position coords relative to the parent if this is a body part. | |
| CStdFPoint | m_oReportPosition |
| This is used for reporting the position back to the GUI. It is the position scaled for distance units. | |
| CStdFPoint | m_oReportRotation |
| CStdFPoint | m_oReportWorldPosition |
| This is used for reporting the position back to the GUI. It is the world position scaled for distance units. | |
| CStdFPoint | m_oRotation |
| std::string | m_strTexture |
| An optional texture to apply to the rigid body. | |
| CStdColor | m_vAmbient |
| The ambient color to apply to this part. It is specified as red, green, blue, and alpha. | |
| CStdColor | m_vDiffuse |
| The diffuse color to apply to this part. It is specified as red, green, blue, and alpha. | |
| CStdFPoint | m_vSelectedVertex |
| The relative position of the selected vertex. | |
| CStdColor | m_vSpecular |
| The specular color to apply to this part. It is specified as red, green, blue, and alpha. | |
Definition at line 18 of file MotorizedJoint.h.
|
protectedvirtual |
Applies the motor assist.
Reimplemented in BulletAnimatSim::Environment::Joints::BlHinge, and BulletAnimatSim::Environment::Joints::BlPrismatic.
Definition at line 1346 of file MotorizedJoint.cpp.
|
virtual |
Gets the assist countdown.
Countdown timer till we can begin applying motor assist. Once a motor is turned on we wait for this many time steps before checking if its velocity matches the desired velocity. This is so the part has a chanct to start moving and so we do not apply additional forces if it is not required.
Definition at line 551 of file MotorizedJoint.cpp.
References m_iAssistCountdown.
|
virtual |
Sets the assist countdown.
| iVal | The coundown value. |
Definition at line 562 of file MotorizedJoint.cpp.
References m_iAssistCountdown, and StdUtils::Std_IsAboveMin().
Here is the call graph for this function:
|
virtual |
Gets a pointer to the motor assist pid controller.
Definition at line 948 of file MotorizedJoint.cpp.
References m_lpAssistPid.
|
protectedvirtual |
Clears the assist forces.
Definition at line 1319 of file MotorizedJoint.cpp.
References m_fltMotorAssistMagnitude, m_fltMotorAssistMagnitudeReport, m_lpAssistPid, m_vMotorAssistForceToA, m_vMotorAssistForceToAReport, m_vMotorAssistForceToB, m_vMotorAssistForceToBReport, m_vMotorAssistTorqueToA, m_vMotorAssistTorqueToAReport, m_vMotorAssistTorqueToB, m_vMotorAssistTorqueToBReport, m_vMotorForceToA, m_vMotorForceToB, m_vMotorTorqueToA, and m_vMotorTorqueToB.
Referenced by ResetSimulation().
Here is the caller graph for this function:
|
virtual |
Gets the desired Position.
Definition at line 353 of file MotorizedJoint.cpp.
References m_fltDesiredPosition.
Referenced by AnimatSim::ExternalStimuli::MotorStimulus::StepSimulation().
Here is the caller graph for this function:
|
virtual |
Sets the desired Position.
| fltPosition | The new Position. |
Definition at line 366 of file MotorizedJoint.cpp.
References m_fltDesiredPosition.
|
virtual |
Gets the desired velocity.
Definition at line 480 of file MotorizedJoint.cpp.
References m_fltDesiredVelocity, and m_fltMaxVelocity.
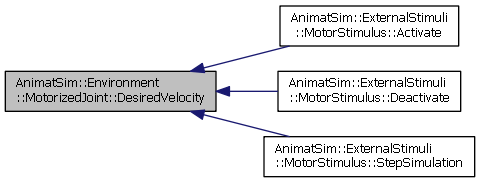
Referenced by AnimatSim::ExternalStimuli::MotorStimulus::Activate(), AnimatSim::ExternalStimuli::MotorStimulus::Deactivate(), and AnimatSim::ExternalStimuli::MotorStimulus::StepSimulation().
Here is the caller graph for this function:
|
virtual |
Sets the desired velocity.
| fltVelocity | The new velocity. |
Definition at line 501 of file MotorizedJoint.cpp.
References m_fltDesiredVelocity.
|
protectedvirtual |
Enables joint feedback.
Reimplemented in BulletAnimatSim::Environment::Joints::BlHinge, and BulletAnimatSim::Environment::Joints::BlPrismatic.
Definition at line 1355 of file MotorizedJoint.cpp.
|
virtual |
Enables/disables the motor lock.
If you enable the motor lock then this locks the joint at the specified location. Only a force greater than fltMaxLockForce will be able to move it from this position.
| bOn | true to on. |
| fltPosition | The flt position. |
| fltMaxLockForce | The flt maximum lock force. |
Definition at line 1057 of file MotorizedJoint.cpp.
References m_lpPhysicsMotorJoint.
|
virtual |
Tells if the motor is enabled.
Definition at line 132 of file MotorizedJoint.cpp.
References m_bEnableMotor.
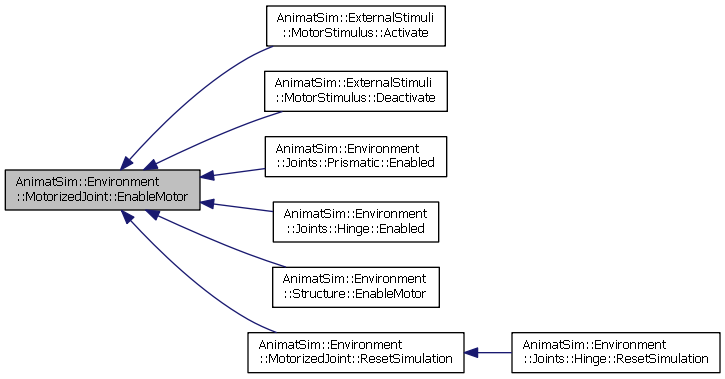
Referenced by AnimatSim::ExternalStimuli::MotorStimulus::Activate(), AnimatSim::ExternalStimuli::MotorStimulus::Deactivate(), AnimatSim::Environment::Joints::Prismatic::Enabled(), AnimatSim::Environment::Joints::Hinge::Enabled(), AnimatSim::Environment::Structure::EnableMotor(), and ResetSimulation().
Here is the caller graph for this function:
|
virtual |
Enables the motor.
If this is a motorized joint then when you turn it on the physics engine will calculate the torque that needs to be applied to this joint in order for it to have the desired Velocity for its current load.
| bVal | true to enable. |
Definition at line 147 of file MotorizedJoint.cpp.
References m_bEnableMotor, m_bEnableMotorInit, m_fltDesiredVelocity, m_fltMaxForce, m_lpPhysicsMotorJoint, AnimatSim::AnimatBase::m_lpSim, AnimatSim::Environment::IMotorizedJoint::Physics_EnableMotor(), and AnimatSim::Simulator::SimRunning().
Here is the call graph for this function:
|
virtual |
Initializes this object.
After an object is loaded in it must be initialized before it can be used. This allows the object to retrieve any pointers or setup memory that it will need during execution. Each object is responsible for initializing any of its child objects, so you simply need to call this method on the containing class to init all child objects. It also calls VerifySystemPointers to make sure that the system pointers have been setup correctly.
Reimplemented from AnimatSim::Environment::Joint.
Definition at line 1063 of file MotorizedJoint.cpp.
References AnimatSim::Simulator::DistanceUnits(), AnimatSim::Environment::Joint::Initialize(), m_fltSetPositionDeltaCheck, AnimatSim::AnimatBase::m_lpSim, and AnimatSim::Environment::Joint::UsesRadians().
Here is the call graph for this function:
|
virtual |
Sets the Maximum torque.
| fltVal | The new value. |
| bUseScaling | true to use unit scaling. |
Definition at line 224 of file MotorizedJoint.cpp.
References AnimatSim::Simulator::InverseDistanceUnits(), AnimatSim::Simulator::InverseMassUnits(), m_fltMaxForce, m_fltMaxForceNotScaled, m_lpPhysicsMotorJoint, AnimatSim::AnimatBase::m_lpSim, AnimatSim::Environment::IMotorizedJoint::Physics_MaxForce(), StdUtils::Std_IsAboveMin(), and AnimatSim::Environment::Joint::UsesRadians().
Here is the call graph for this function:
|
virtual |
Gets the maximum torque.
Definition at line 259 of file MotorizedJoint.cpp.
References m_fltMaxForce.
|
virtual |
Gets the maximum force/torque a motor can apply. This is the unscaled value.
Definition at line 269 of file MotorizedJoint.cpp.
References m_fltMaxForceNotScaled.
|
virtual |
Gets the maximum velocity.
Definition at line 279 of file MotorizedJoint.cpp.
References m_fltMaxVelocity.
|
virtual |
Sets the maximum velocity allowed by the motorized joint.
| fltVal | The new value. |
| bUseScaling | true to use unit scaling. |
Definition at line 290 of file MotorizedJoint.cpp.
References AnimatSim::Simulator::InverseDistanceUnits(), m_fltMaxVelocity, AnimatSim::AnimatBase::m_lpSim, StdUtils::Std_IsAboveMin(), and AnimatSim::Environment::Joint::UsesRadians().
Here is the call graph for this function:
|
virtual |
Gets the force vector that the motor assist is applying to body A. (scaled units).
Definition at line 623 of file MotorizedJoint.cpp.
References m_vMotorAssistForceToA.
|
virtual |
Sets the force vector that the motor assist is applying to body A. (scaled units).
| [in,out] | vVal | The input value. |
Definition at line 634 of file MotorizedJoint.cpp.
References m_vMotorAssistForceToA.
|
virtual |
Gets the force vector that the motor assist is applying to body A. (un-scaled units). This is used for reporting purposes.
Definition at line 646 of file MotorizedJoint.cpp.
References m_vMotorAssistForceToAReport.
|
virtual |
Sets the force vector that the motor assist is applying to body A. (un-scaled units). This is used for reporting purposes.
| [in,out] | vVal | The input value. |
Definition at line 658 of file MotorizedJoint.cpp.
References m_vMotorAssistForceToAReport.
|
virtual |
Gets the force vector that the motor assist is applying to body B. (scaled units).
Definition at line 716 of file MotorizedJoint.cpp.
References m_vMotorAssistForceToB.
|
virtual |
Sets the force vector that the motor assist is applying to body B. (scaled units).
| [in,out] | vVal | The input value. |
Definition at line 727 of file MotorizedJoint.cpp.
References m_vMotorAssistForceToB.
|
virtual |
Gets the force vector that the motor assist is applying to body B. (scaled units). This is used for reporting purposes.
Definition at line 739 of file MotorizedJoint.cpp.
References m_vMotorAssistForceToBReport.
|
virtual |
Sets the force vector that the motor assist is applying to body B. (un-scaled units). This is used for reporting purposes.
| [in,out] | vVal | The input value. |
Definition at line 751 of file MotorizedJoint.cpp.
References m_vMotorAssistForceToBReport.
|
virtual |
Gets the torque vector that the motor assist is applying to body A. (scaled units).
Definition at line 809 of file MotorizedJoint.cpp.
References m_vMotorAssistTorqueToA.
|
virtual |
Sets the torque vector that the motor assist is applying to body A. (scaled units).
| [in,out] | vVal | The input value. |
Definition at line 820 of file MotorizedJoint.cpp.
References m_vMotorAssistTorqueToA.
|
virtual |
Gets the torque vector that the motor assist is applying to body A. (un-scaled units). This is used for reporting purposes.
Definition at line 832 of file MotorizedJoint.cpp.
References m_vMotorAssistTorqueToAReport.
|
virtual |
Sets the torque vector that the motor assist is applying to body A. (un-scaled units). This is used for reporting purposes.
| [in,out] | vVal | The input value. |
Definition at line 844 of file MotorizedJoint.cpp.
References m_vMotorAssistTorqueToAReport.
|
virtual |
Gets the torque vector that the motor assist is applying to body B. (scaled units).
Definition at line 902 of file MotorizedJoint.cpp.
References m_vMotorAssistTorqueToB.
|
virtual |
Sets the torque vector that the motor assist is applying to body B. (scaled units).
| [in,out] | vVal | The input value. |
Definition at line 913 of file MotorizedJoint.cpp.
References m_vMotorAssistTorqueToB.
|
virtual |
Gets the torque vector that the motor assist is applying to body B. (un-scaled units). This is used for reporting purposes.
Definition at line 925 of file MotorizedJoint.cpp.
References m_vMotorAssistTorqueToBReport.
|
virtual |
Sets the torque vector that the motor assist is applying to body B. (un-scaled units). This is used for reporting purposes.
| [in,out] | vVal | The input value. |
Definition at line 937 of file MotorizedJoint.cpp.
References m_vMotorAssistTorqueToBReport.
|
virtual |
Gets the force vector that the motor is applying to body A. (un-scaled units). This includes any motor assist within it.
Definition at line 577 of file MotorizedJoint.cpp.
References m_vMotorForceToA.
|
virtual |
Sets the force vector that the motor is applying to body A. (un-scaled units). This includes any motor assist within it.
| [in,out] | vVal | The input value. |
Definition at line 589 of file MotorizedJoint.cpp.
References m_fltMotorForceAMagnitude, and m_vMotorForceToA.
|
virtual |
Gets the magnitude of the force that the motor is applying to body A. (scaled units).
Definition at line 603 of file MotorizedJoint.cpp.
References m_fltMotorForceAMagnitude.
|
virtual |
Sets the magnitude of the force that the motor is applying to body A. (scaled units).
| [in] | fltVal | The motor force magnitude value. |
Definition at line 613 of file MotorizedJoint.cpp.
References m_fltMotorForceAMagnitude.
|
virtual |
Gets the force vector that the motor is applying to body B. (un-scaled units). This includes any motor assist within it.
Definition at line 670 of file MotorizedJoint.cpp.
References m_vMotorForceToB.
|
virtual |
Sets the force vector that the motor is applying to body B. (un-scaled units). This includes any motor assist within it.
| [in,out] | vVal | The input value. |
Definition at line 682 of file MotorizedJoint.cpp.
References m_fltMotorForceBMagnitude, and m_vMotorForceToB.
|
virtual |
Gets the magnitude of the force that the motor is applying to body B. (scaled units).
Definition at line 696 of file MotorizedJoint.cpp.
References m_fltMotorForceBMagnitude.
|
virtual |
Sets the magnitude of the force that the motor is applying to body B. (scaled units).
| [in] | fltVal | The motor force magnitude value. |
Definition at line 706 of file MotorizedJoint.cpp.
References m_fltMotorForceBMagnitude.
|
virtual |
Sets the desired velocity.
| fltInput | The new velocity. |
Definition at line 514 of file MotorizedJoint.cpp.
References m_fltDesiredVelocity.
Referenced by AnimatSim::Environment::Structure::SetMotorInput().
Here is the caller graph for this function:
|
virtual |
Gets the torque vector that the motor is applying to body A. (un-scaled units). This includes any motor assist within it.
Definition at line 763 of file MotorizedJoint.cpp.
References m_vMotorTorqueToA.
|
virtual |
Sets the torque vector that the motor is applying to body A. (un-scaled units). This includes any motor assist within it.
| [in,out] | vVal | The input value. |
Definition at line 775 of file MotorizedJoint.cpp.
References m_fltMotorTorqueAMagnitude, and m_vMotorTorqueToA.
|
virtual |
Gets the magnitude of the torque that the motor is applying to body A. (scaled units).
Definition at line 789 of file MotorizedJoint.cpp.
References m_fltMotorTorqueAMagnitude.
|
virtual |
Sets the magnitude of the torque that the motor is applying to body A. (scaled units).
| [in] | fltVal | The motor torque magnitude value. |
Definition at line 799 of file MotorizedJoint.cpp.
References m_fltMotorTorqueAMagnitude.
|
virtual |
Gets the torque vector that the motor is applying to body B. (un-scaled units). This includes any motor assist within it.
Definition at line 856 of file MotorizedJoint.cpp.
References m_vMotorTorqueToB.
|
virtual |
Sets the torque vector that the motor is applying to body B. (un-scaled units). This includes any motor assist within it.
| [in,out] | vVal | The input value. |
Definition at line 868 of file MotorizedJoint.cpp.
References m_fltMotorTorqueBMagnitude, and m_vMotorTorqueToB.
|
virtual |
Gets the magnitude of the torque that the motor is applying to body B. (scaled units).
Definition at line 882 of file MotorizedJoint.cpp.
References m_fltMotorTorqueBMagnitude.
|
virtual |
Sets the magnitude of the torque that the motor is applying to body B. (scaled units).
| [in] | fltVal | The motor torque magnitude value. |
Definition at line 892 of file MotorizedJoint.cpp.
References m_fltMotorTorqueBMagnitude.
|
virtual |
Sets the type of motor to use for this joint.
The standard motor type is velocity controlled. A position controlled servo allows the user to specify the desired position and the motor tries to get to that position as fast as possible. A position and velocity controlled servo allows the user to specify the desired positin and the desired velocity magnitude. The servo will attempt to move to the desired position at the specified speed. Once it reaches that position it will attemp to maintain it. Any supplied desired velocity values will use only the magnitude portion and determine the direction of movmeent based on the current position and desired position.
| eServo | motor type. |
Definition at line 173 of file MotorizedJoint.cpp.
References m_eMotorType.
|
virtual |
Gets the type of motor to use for this joint.
The standard motor type is velocity controlled. A position controlled servo allows the user to specify the desired position and the motor tries to get to that position as fast as possible. A position and velocity controlled servo allows the user to specify the desired positin and the desired velocity magnitude. The servo will attempt to move to the desired position at the specified speed. Once it reaches that position it will attemp to maintain it. Any supplied desired velocity values will use only the magnitude portion and determine the direction of movmeent based on the current position and desired position.
Definition at line 189 of file MotorizedJoint.cpp.
References m_eMotorType.
|
virtual |
Gets the physics body interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each joint..
Definition at line 107 of file MotorizedJoint.cpp.
References m_lpPhysicsMotorJoint.
|
virtual |
Sets the physics motorized joint interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each joint..
| [in,out] | lpBody | The pointer to the phsyics body interface. |
Definition at line 119 of file MotorizedJoint.cpp.
References m_lpPhysicsMotorJoint.
|
virtual |
Gets the previous set position.
Definition at line 379 of file MotorizedJoint.cpp.
References m_fltPrevSetPosition.
|
virtual |
Sets the previous desired Position.
| fltVal | The prev Position. |
Definition at line 389 of file MotorizedJoint.cpp.
References m_fltPrevSetPosition.
|
virtual |
Gets the previous set etVelocity.
Definition at line 460 of file MotorizedJoint.cpp.
References m_fltPrevSetVelocity.
|
virtual |
Sets the previous desired velocity.
| fltVal | The prev etVelocity. |
Definition at line 470 of file MotorizedJoint.cpp.
References m_fltPrevSetVelocity.
|
virtual |
Sets the previous velocity that is actually used by the physics method.
Definition at line 527 of file MotorizedJoint.cpp.
References m_fltPrevVelocity.
|
virtual |
Sets the previous velocity that is actually used by the physics method.
| fltVal | The previous value. |
Definition at line 537 of file MotorizedJoint.cpp.
References m_fltPrevVelocity.
|
virtual |
Gets whether the servo motor has reached its target position. If it has then it switches to position only control until the user sets a new target position.
Definition at line 400 of file MotorizedJoint.cpp.
References m_bReachedSetPos.
|
virtual |
whether the servo motor has reached its target position.
| bVal | True when it has reached its target position. |
Definition at line 410 of file MotorizedJoint.cpp.
References m_bReachedSetPos.
|
virtual |
Resets the simulation back to time 0.
This method calls the ResetSimulation method on all subitems in order to reset the simulation back to the beginning.
Reimplemented from AnimatSim::Environment::Joint.
Reimplemented in AnimatSim::Environment::Joints::Hinge, BulletAnimatSim::Environment::Joints::BlHinge, BulletAnimatSim::Environment::Joints::BlPrismatic, RoboticsAnimatSim::Environment::Joints::RbHinge, and RoboticsAnimatSim::Environment::Joints::RbPrismatic.
Definition at line 1071 of file MotorizedJoint.cpp.
References ClearAssistForces(), AnimatSim::Simulator::DistanceUnits(), EnableMotor(), m_bEnableMotorInit, m_bReachedSetPos, m_fltDesiredPosition, m_fltDesiredVelocity, m_fltMotorForceAMagnitude, m_fltMotorForceBMagnitude, m_fltMotorTorqueAMagnitude, m_fltMotorTorqueBMagnitude, m_fltPrevSetPosition, m_fltPrevVelocity, m_fltReportSetPosition, m_fltReportSetVelocity, m_fltSetPosition, m_fltSetPositionDeltaCheck, m_fltSetVelocity, m_iAssistCountdown, m_lpAssistPid, AnimatSim::AnimatBase::m_lpSim, AnimatSim::AnimatBase::Reset(), AnimatSim::Environment::Joint::ResetSimulation(), and AnimatSim::Environment::Joint::UsesRadians().
Referenced by AnimatSim::Environment::Joints::Hinge::ResetSimulation().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Gets the robot motor control interface.
Definition at line 1014 of file MotorizedJoint.cpp.
References m_lpRobotMotorControl.
|
virtual |
Sets the servo gain used to calculate the new velocity for maintaining a position with a servo motor.
| fltVal | The new gain value. |
Definition at line 199 of file MotorizedJoint.cpp.
References m_ftlServoGain, and StdUtils::Std_IsAboveMin().
Here is the call graph for this function:
|
virtual |
Gets the servo gain.
Definition at line 213 of file MotorizedJoint.cpp.
References m_ftlServoGain.
|
virtual |
Gets the position that is actually set using the physics method.
Definition at line 308 of file MotorizedJoint.cpp.
References m_fltSetPosition.
|
virtual |
Sets the Position that is actually set using the physics method.
| fltVal | The new value. |
Definition at line 318 of file MotorizedJoint.cpp.
References AnimatSim::Simulator::DistanceUnits(), AnimatSim::Simulator::InSimulation(), m_bReachedSetPos, m_fltPrevSetPosition, m_fltReportSetPosition, m_fltSetPosition, m_fltSetPositionDeltaCheck, m_lpRobotMotorControl, AnimatSim::AnimatBase::m_lpSim, AnimatSim::AnimatBase::m_lpStructure, AnimatSim::Robotics::RobotPartInterface::QuantizeServoPosition(), AnimatSim::Robotics::RobotInterface::SynchSim(), and AnimatSim::Environment::Joint::UsesRadians().
Here is the call graph for this function:
|
virtual |
Gets the velocity that is actually set using the physics method.
Definition at line 420 of file MotorizedJoint.cpp.
References m_fltSetVelocity.
Referenced by BulletAnimatSim::Environment::Joints::BlPrismatic::ApplyMotorAssist(), and BulletAnimatSim::Environment::Joints::BlHinge::ApplyMotorAssist().
Here is the caller graph for this function:
|
virtual |
Sets the velocity that is actually set using the physics method.
| fltVal | The new value. |
Definition at line 430 of file MotorizedJoint.cpp.
References AnimatSim::Simulator::DistanceUnits(), AnimatSim::Simulator::InSimulation(), m_fltPrevSetVelocity, m_fltReportSetVelocity, m_fltSetVelocity, m_lpRobotMotorControl, AnimatSim::AnimatBase::m_lpSim, AnimatSim::AnimatBase::m_lpStructure, AnimatSim::Robotics::RobotPartInterface::QuantizeServoVelocity(), AnimatSim::Robotics::RobotInterface::SynchSim(), and AnimatSim::Environment::Joint::UsesRadians().
Here is the call graph for this function:
|
virtual |
Sets the desired velocity to use for the motor.
Definition at line 1038 of file MotorizedJoint.cpp.
References m_lpPhysicsMotorJoint.
Referenced by RoboticsAnimatSim::Environment::Joints::RbPrismatic::StepSimulation(), VortexAnimatSim::Environment::Joints::VsPrismatic::StepSimulation(), RoboticsAnimatSim::Environment::Joints::RbHinge::StepSimulation(), BulletAnimatSim::Environment::Joints::BlPrismatic::StepSimulation(), BulletAnimatSim::Environment::Joints::BlHinge::StepSimulation(), and VortexAnimatSim::Environment::Joints::VsHinge::StepSimulation().
Here is the caller graph for this function:
|
virtual |
Gets the motor temperature.
Definition at line 959 of file MotorizedJoint.cpp.
|
virtual |
Sets the motor temperature.
| [in] | fltVal | The temperature value. |
Definition at line 969 of file MotorizedJoint.cpp.
References StdUtils::Std_IsAboveMin().
Here is the call graph for this function:
|
virtual |
Gets the motor voltage.
Definition at line 984 of file MotorizedJoint.cpp.
|
virtual |
Sets the motor voltage.
| [in] | fltVal | The voltage value. |
Definition at line 994 of file MotorizedJoint.cpp.
|
protected |
Tells whether the motor was enabled when the sim started. This is used when resetting the simulation back to its initial settings.
Definition at line 75 of file MotorizedJoint.h.
Referenced by AnimatSim::Environment::Joints::Prismatic::Enabled(), AnimatSim::Environment::Joints::Hinge::Enabled(), EnableMotor(), and ResetSimulation().
|
protected |
Once a servo reaches its set position this is set to true to go to position only control to maintain that position. If the user sets a different target position then this is reset until it reaches that new location.
Definition at line 43 of file MotorizedJoint.h.
Referenced by ReachedSetPosition(), ResetSimulation(), and SetPosition().
|
protected |
This is the desired position of a motorized servo motor. IE the target position we are shooting for. The Desired position must get reset at each time step to zero, so it can be added to using AddExternalInput for the next time step. m_fltSetPosition then keeps track of what we set the position of the motor to be. Positions can be in rad or m depending on the type of joint. UsesRadians lets you know whether it is using radians.
Definition at line 32 of file MotorizedJoint.h.
Referenced by AnimatSim::Environment::Joints::Prismatic::AddExternalNodeInput(), AnimatSim::Environment::Joints::Hinge::AddExternalNodeInput(), DesiredPosition(), ResetSimulation(), and AnimatSim::Environment::Joints::Hinge::UpdateData().
|
protected |
This is the desired velocity of the motorized joint. IE the target we are shooting for. The Desired velocity must get reset at each time step to zero, so it can be added to using AddExternalInput for the next time step. m_fltSetVelocity then keeps track of what we set the velocity of the motor to be. Velocities can be in rad/sec or m/s depending on the type of joint. UsesRadians lets you know whether it is using radians.
Definition at line 57 of file MotorizedJoint.h.
Referenced by AnimatSim::Environment::Joints::Prismatic::AddExternalNodeInput(), AnimatSim::Environment::Joints::Hinge::AddExternalNodeInput(), DesiredVelocity(), EnableMotor(), MotorInput(), and ResetSimulation().
|
protected |
The maximum force/torque that the motor can apply. Whether this is force or torque depends on whether the joint uses radians or not.
Definition at line 79 of file MotorizedJoint.h.
Referenced by EnableMotor(), and MaxForce().
|
protected |
The maximum velocity that the motorized joint can attain. Velocities can be in rad/sec or m/s depending on the type of joint. UsesRadians lets you know whether it is using radians.
Definition at line 64 of file MotorizedJoint.h.
Referenced by DesiredVelocity(), and MaxVelocity().
|
protected |
The previous position set for the motorized joint in the last time step. Positions can be in rad or m depending on the type of joint. UsesRadians lets you know whether it is using radians.
Definition at line 39 of file MotorizedJoint.h.
Referenced by PrevSetPosition(), ResetSimulation(), and SetPosition().
|
protected |
The previous velocity of the motorized joint in the last time step. Velocities can be in rad/sec or m/s depending on the type of joint. UsesRadians lets you know whether it is using radians.
Definition at line 68 of file MotorizedJoint.h.
Referenced by PrevVelocity(), and ResetSimulation().
|
protected |
This is set position for a servo motor. The motor must be set to servo and enabled. This will be set based on the desired position passed into the joint using the AddExternalInput method.
Definition at line 26 of file MotorizedJoint.h.
Referenced by ResetSimulation(), and SetPosition().
|
protected |
This is the velocity to use for the motorized joint. The motor must be enabled for this parameter to have any effect. Velocities can be in rad/sec or m/s depending on the type of joint. UsesRadians lets you know whether it is using radians.
Definition at line 48 of file MotorizedJoint.h.
Referenced by ResetSimulation(), and SetVelocity().
|
protected |
Countdown timer till we can begin applying motor assist. Once a motor is turned on we wait for this many time steps before checking if its velocity matches the desired velocity. This is so the part has a chanct to start moving and so we do not apply additional forces if it is not required.
Definition at line 93 of file MotorizedJoint.h.
Referenced by BulletAnimatSim::Environment::Joints::BlPrismatic::ApplyMotorAssist(), BulletAnimatSim::Environment::Joints::BlHinge::ApplyMotorAssist(), AssistCountdown(), and ResetSimulation().
|
protected |
Force vector that the motor is applying to body A. (un-scaled units). This includes any motor assist within it.
Definition at line 97 of file MotorizedJoint.h.
Referenced by ClearAssistForces(), and MotorForceToA().
|
protected |
Force vector that the motor is applying to body B. (un-scaled units). This includes any motor assist within it.
Definition at line 110 of file MotorizedJoint.h.
Referenced by ClearAssistForces(), and MotorForceToB().
|
protected |
Torque vector that the motor is applying to body A. (un-scaled units). This includes any motor assist within it.
Definition at line 123 of file MotorizedJoint.h.
Referenced by ClearAssistForces(), and MotorTorqueToA().
|
protected |
Torque vector that the motor is applying to body B. (un-scaled units). This includes any motor assist within it.
Definition at line 136 of file MotorizedJoint.h.
Referenced by ClearAssistForces(), and MotorTorqueToB().
 1.8.10
1.8.10