|
AnimatLab
2
Test
|
|
AnimatLab
2
Test
|
A dynamic organism that is controlled by a neural network. More...
#include <Organism.h>
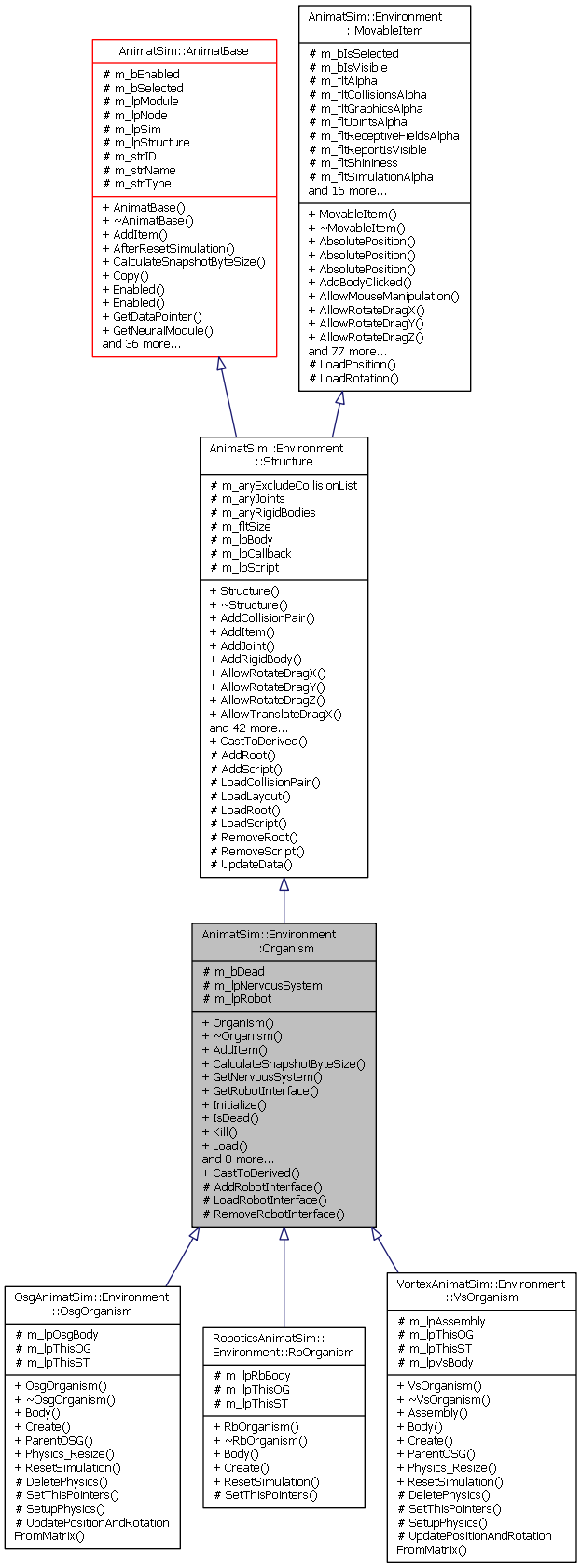
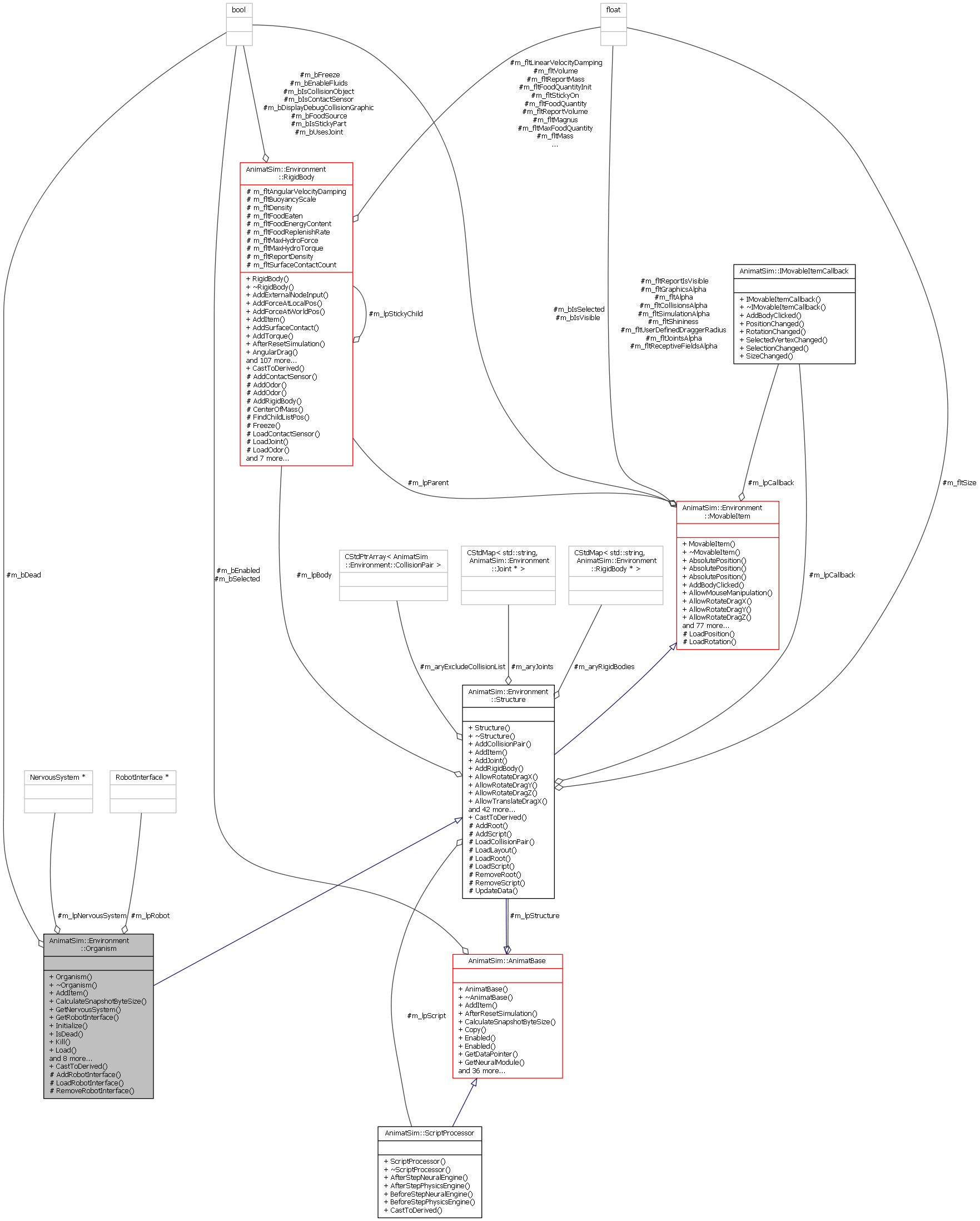
 Inheritance diagram for AnimatSim::Environment::Organism: Collaboration diagram for AnimatSim::Environment::Organism:
Inheritance diagram for AnimatSim::Environment::Organism: Collaboration diagram for AnimatSim::Environment::Organism:Public Member Functions | |
| Organism () | |
| Default constructor. More... | |
| virtual | ~Organism () |
| Destructor. More... | |
| virtual bool | AddItem (const std::string &strItemType, const std::string &strXml, bool bThrowError=true, bool bDoNotInit=false) |
| Adds a new object to this parent. More... | |
| virtual long | CalculateSnapshotByteSize () |
| Calculates the snapshot byte size. More... | |
| virtual AnimatSim::Behavior::NervousSystem * | GetNervousSystem () |
| virtual RobotInterface * | GetRobotInterface () |
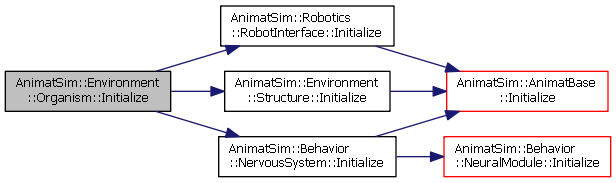
| virtual void | Initialize () |
| Initializes this object. More... | |
| virtual bool | IsDead () |
| Query if this object is dead. More... | |
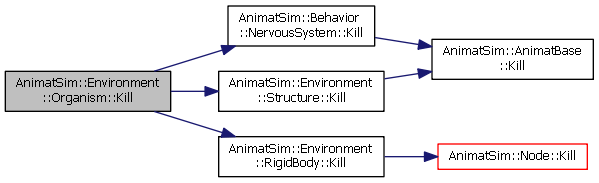
| virtual void | Kill (bool bState=true) |
| Kills. More... | |
| virtual void | Load (CStdXml &oXml) |
| virtual void | LoadKeyFrameSnapshot (byte *aryBytes, long &lIndex) |
| Loads a key frame snapshot. More... | |
| virtual void | MinTimeStep (float &fltMin) |
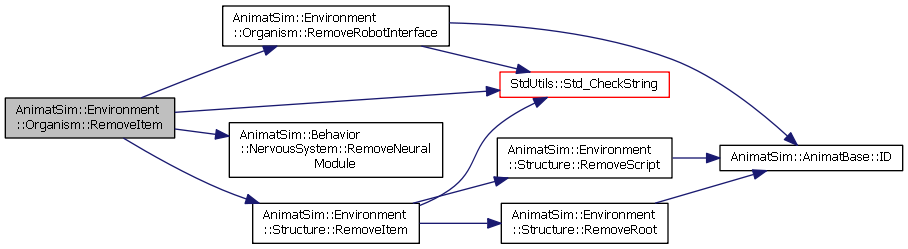
| virtual bool | RemoveItem (const std::string &strItemType, const std::string &strID, bool bThrowError=true) |
| Removes a child item from this parent. More... | |
| virtual void | ResetSimulation () |
| Resets the simulation back to time 0. More... | |
| virtual void | SaveKeyFrameSnapshot (byte *aryBytes, long &lIndex) |
| Saves a key frame snapshot. More... | |
| virtual bool | SetData (const std::string &strDataType, const std::string &strValue, bool bThrowError=true) |
| Set a variable based on a string data type name. More... | |
| virtual void | StepNeuralEngine () |
| Step neural engine. More... | |
| virtual void | StepPhysicsEngine () |
| Allows the organism and its parts to update at each time slice. More... | |
| Public Member Functions inherited from AnimatSim::Environment::Structure | |
| Structure () | |
| Default constructor. More... | |
| virtual | ~Structure () |
| Destructor. More... | |
| virtual void | AddCollisionPair (std::string strID1, std::string strID2) |
| Adds a collision pair to m_aryExcludeCollisionList. More... | |
| void | AddJoint (Joint *lpJoint) |
| Adds a new joint to the list of all joints for this structure. More... | |
| void | AddRigidBody (RigidBody *lpBody) |
| Adds a new rigid body to the list of all bodies for this structure. More... | |
| virtual bool | AllowRotateDragX () |
| Gets whether this body part can be rotated along the x-axis by the user with the drag handlers. More... | |
| virtual bool | AllowRotateDragY () |
| Gets whether this body part can be rotated along the y-axis by the user with the drag handlers. More... | |
| virtual bool | AllowRotateDragZ () |
| Gets whether this body part can be rotated along the z-axis by the user with the drag handlers. More... | |
| virtual bool | AllowTranslateDragX () |
| Gets whether this body part can be translated along the x-axis by the user with the drag handlers. More... | |
| virtual bool | AllowTranslateDragY () |
| Gets whether this body part can be translated along the y-axis by the user with the drag handlers. More... | |
| virtual bool | AllowTranslateDragZ () |
| Gets whether this body part can be translated along the z-axis by the user with the drag handlers. More... | |
| virtual void | Body (RigidBody *lpBody) |
| Sets the root body. More... | |
| virtual RigidBody * | Body () |
| Gets the root body. More... | |
| virtual void | Create () |
| virtual void | DisableCollision (RigidBody *lpCollisionBody) |
| Disables collision between the past-in object and all rigid bodies of this structure. More... | |
| virtual void | EnableCollision (RigidBody *lpCollisionBody) |
| Enables collision between the past-in object and all rigid bodies of this structure. More... | |
| virtual void | EnableMotor (std::string strJointID, bool bVal) |
| Enables the given joints motor. More... | |
| virtual CStdPtrArray< CollisionPair > | ExclusionList () |
| Gets the collision exclusion list as an array. More... | |
| virtual Joint * | FindJoint (std::string strJointID, bool bThrowError=true) |
| Finds a joint with a specified ID within this structure. More... | |
| virtual Node * | FindNode (std::string strID, bool bThrowError=true) |
| Searches for a Node with the given ID. More... | |
| virtual RigidBody * | FindRigidBody (std::string strBodyID, bool bThrowError=true) |
| Finds a rigid body with a specified ID within this structure. More... | |
| virtual float * | GetDataPointer (const std::string &strDataType) |
| Returns a float pointer to a data item of interest in this object. More... | |
| virtual CStdFPoint | Position () |
| Gets the local position. (m_oPosition) More... | |
| virtual void | Position (CStdFPoint &oPoint, bool bUseScaling=true, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the local position. (m_oPosition) More... | |
| virtual void | QueryProperties (CStdPtrArray< TypeProperty > &aryProperties) |
| Queries this object for a list of properties that can be changed using SetData. More... | |
| void | RemoveJoint (std::string strID) |
| Removes the joint with the specified ID. More... | |
| void | RemoveRigidBody (std::string strID) |
| Removes the rigid body with the specified ID. More... | |
| virtual void | Script (ScriptProcessor *lpScript) |
| virtual ScriptProcessor * | Script () |
| virtual void | Selected (bool bValue, bool bSelectMultiple) |
| Selects this object. More... | |
| virtual void | SetMotorInput (std::string strJointID, float fltInput) |
| Sets the velocity for the specified joint. More... | |
| virtual void | SetSystemPointers (Simulator *lpSim, Structure *lpStructure, NeuralModule *lpModule, Node *lpNode, bool bVerify) |
| void | Sim (Simulator *lpSim) |
| Sets the simulator object. More... | |
| virtual void | SimPausing () |
| Called just before the simulation pauses. More... | |
| virtual void | SimStarting () |
| Called just before the simulation starts. More... | |
| virtual void | SimStopping () |
| Called just before the simulation stops. More... | |
| virtual float | Size () |
| Gets the size of the graphical representation of this joint. More... | |
| virtual void | Size (float fltVal, bool bUseScaling=true) |
| Sets the size of the graphical representation of this joint. More... | |
| virtual void | UpdatePhysicsPosFromGraphics () |
| Public Member Functions inherited from AnimatSim::AnimatBase | |
| AnimatBase () | |
| Constructs an AnimatBase object. More... | |
| virtual | ~AnimatBase () |
| Destroys the AnimatBase object.. More... | |
| virtual void | AfterResetSimulation () |
| Called after a simulation reset for some objects. More... | |
| virtual void | Copy (CStdSerialize *lpSource) |
| virtual void | Enabled (bool bVal) |
| Tells whether this item is enabled or not. This is not actually used for all objects, only specific ones. I am putting it in the base class though to prevent numerous duplications. More... | |
| virtual bool | Enabled () |
| Tells whether this item is enabled or not. This is not actually used for all objects, only specific ones. I am putting it in the base class though to prevent numerous duplications. More... | |
| virtual NeuralModule * | GetNeuralModule () |
| Gets the neural module. More... | |
| virtual Node * | GetNode () |
| Gets the node. More... | |
| virtual Simulator * | GetSimulator () |
| Gets the simulator pointer. More... | |
| virtual Structure * | GetStructure () |
| Gets the structure for this node. More... | |
| virtual bool | HasProperty (const std::string &strName) |
| Queries this object if it has a property with the given name. More... | |
| virtual std::string | ID () |
| Gets the unique GUID ID of this object. More... | |
| virtual void | ID (std::string strValue) |
| Sets the unique GUID ID of the object. More... | |
| virtual void | Load (StdUtils::CStdXml &oXml) |
| Loads the item using an XML data packet. More... | |
| virtual std::string | Name () |
| Gets the name of this object. More... | |
| virtual void | Name (std::string strValue) |
| Sets the name of the object. Blank is acceptable. More... | |
| virtual AnimatPropertyType | PropertyType (const std::string &strName) |
| virtual void | ReInitialize () |
| Re-initialize this object. More... | |
| virtual void | Reset () |
| Resets this object. More... | |
| virtual void | RigidBodyAdded (std::string strID) |
| virtual void | RigidBodyRemoved (std::string strID) |
| virtual bool | Selected () |
| Tells if this items is selected or not. More... | |
| virtual bool | SetData (const std::string &strDataType, const float fltValue, bool bThrowError=true) |
| Set a variable based on a string data type name. More... | |
| virtual bool | SetData (const std::string &strDataType, const long lValue, bool bThrowError=true) |
| Set a variable based on a string data type name. More... | |
| virtual void | SetSystemPointers (Simulator *lpSim, Structure *lpStructure, NeuralModule *lpModule, Node *lpNode, bool bVerify) |
| Sets the system pointers. More... | |
| virtual void | StepSimulation () |
| Step the simulation for this object. More... | |
| virtual void | TimeStepModified () |
| Notification method that the time step modified has been modified. Objects should recalculate any slice times as needed. More... | |
| virtual std::string | Type () |
| returns the string type name of this object. More... | |
| virtual void | Type (std::string strValue) |
| Sets the class type for this object. More... | |
| virtual void | VerifySystemPointers () |
| Verify that system pointers have been set correctly. More... | |
| virtual void | VisualSelectionModeChanged (int iNewMode) |
| Visual selection mode changed. More... | |
| Public Member Functions inherited from AnimatSim::Environment::MovableItem | |
| MovableItem (void) | |
| Default constructor. More... | |
| virtual | ~MovableItem (void) |
| Destructor. More... | |
| virtual CStdFPoint | AbsolutePosition () |
| Gets the absolute position of this body part. More... | |
| virtual void | AbsolutePosition (CStdFPoint &oPoint) |
| Sets the absolute position of this body part. (m_oAbsPosition) More... | |
| virtual void | AbsolutePosition (float fltX, float fltY, float fltZ) |
| Sets the absolute position of this body part. (m_oAbsPosition) More... | |
| virtual void | AddBodyClicked (float fltPosX, float fltPosY, float fltPosZ, float fltNormX, float fltNormY, float fltNormZ) |
| Called when the user clicks on this object while the AddBody mode is active. More... | |
| virtual bool | AllowMouseManipulation () |
| Tells if a given part can be manipulated using the mouse and draggers. More... | |
| virtual float | Alpha () |
| Gets the current alpha. More... | |
| virtual void | Alpha (float fltAlpha) |
| Sets the current alpha. More... | |
| virtual CStdColor * | Ambient () |
| Gets the ambient color value. More... | |
| virtual void | Ambient (CStdColor &aryColor) |
| virtual void | Ambient (float *aryColor) |
| Sets the Ambient color. More... | |
| virtual void | Ambient (std::string strXml) |
| Loads the Ambient color from an XML data packet. More... | |
| virtual bool | CalculateLocalPosForWorldPos (float fltWorldX, float fltWorldY, float fltWorldZ, CStdFPoint &vLocalPos) |
| Calculates the local position values for matrix transform for the part to be in a specific world position. More... | |
| virtual IMovableItemCallback * | Callback () |
| Gets the callback interface pointer. This is an interface pointer to a callback class that allows us to notify the GUI of events that occur within the simulation. More... | |
| virtual void | Callback (IMovableItemCallback *lpCallback) |
| Sets the callback interface pointer. This is an interface pointer to a callback class that allows us to notify the GUI of events that occur within the simulation. More... | |
| virtual float | CollisionsAlpha () |
| Gets the collisions alpha. More... | |
| virtual void | CollisionsAlpha (float fltVal) |
| Sets the collisions alpha. More... | |
| virtual CStdColor * | Diffuse () |
| Gets the diffuse color. More... | |
| virtual void | Diffuse (CStdColor &aryColor) |
| virtual void | Diffuse (float *aryColor) |
| Sets the Diffuse color. More... | |
| virtual void | Diffuse (std::string strXml) |
| Loads the Diffuse color from an XML data packet. More... | |
| virtual BoundingBox | GetBoundingBox () |
| Gets the bounding box for this part. More... | |
| virtual float | GetBoundingRadius () |
| Gets the bounding radius of this part. More... | |
| virtual CStdFPoint | GetCurrentPosition () |
| Gets the current position of this part. More... | |
| virtual float | GraphicsAlpha () |
| Gets the graphics alpha. More... | |
| virtual void | GraphicsAlpha (float fltVal) |
| Sets the graphics alpha. More... | |
| virtual bool | IsSelected () |
| Query if this object is selected. More... | |
| virtual bool | IsVisible () |
| Query if this object is visible. More... | |
| virtual void | IsVisible (bool bVal) |
| Sets whether this part is visible or not. More... | |
| virtual float | JointsAlpha () |
| Gets the joints alpha. More... | |
| virtual void | JointsAlpha (float fltVal) |
| Sets the joints alpha. More... | |
| virtual std::string | LocalTransformationMatrixString () |
| Returns a string representation of the transformation matrix of this object. This is primarily used to save off the transform matrix into the project file. More... | |
| virtual void | OrientNewPart (float fltXPos, float fltYPos, float fltZPos, float fltXNorm, float fltYNorm, float fltZNorm) |
| Orients a new part based on where the parent was clicked and the normal of the surface face. More... | |
| RigidBody * | Parent () |
| Gets the parent RigidBody of this part. More... | |
| void | Parent (RigidBody *lpValue) |
| Sets the parent RigidBody of this part. More... | |
| virtual IPhysicsMovableItem * | PhysicsMovableItem () |
| Gets the physics body interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each box, sphere, etc.. More... | |
| virtual void | PhysicsMovableItem (IPhysicsMovableItem *lpBase) |
| Sets the physics body interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each box, sphere, etc.. More... | |
| virtual void | Position (float fltX, float fltY, float fltZ, bool bUseScaling=true, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the local position. (m_oPosition) More... | |
| virtual void | Position (std::string strXml, bool bUseScaling=true, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the local position. (m_oPosition). This method is primarily used by the GUI to reset the local position using an xml data packet. More... | |
| virtual float | ReceptiveFieldsAlpha () |
| Gets the receptive fields alpha. More... | |
| virtual void | ReceptiveFieldsAlpha (float fltVal) |
| Sets the receptive fields alpha. More... | |
| virtual CStdFPoint | ReportPosition () |
| Gets the reported local position. (m_oReportPosition). More... | |
| virtual void | ReportPosition (CStdFPoint &oPoint) |
| Sets the reported local position. (m_oReportPosition). More... | |
| virtual void | ReportPosition (float fltX, float fltY, float fltZ) |
| Sets the reported local position. (m_oReportPosition). More... | |
| virtual CStdFPoint | ReportRotation () |
| Gets the reported rotation of this part. (m_oReportRotation) More... | |
| virtual void | ReportRotation (CStdFPoint &oPoint) |
| Sets the reported rotation of this part. (m_oReportRotation) More... | |
| virtual void | ReportRotation (float fltX, float fltY, float fltZ) |
| Sets the reported rotation of this part. (m_oReportRotation) More... | |
| virtual CStdFPoint | ReportWorldPosition () |
| Gets the reported world position. (m_oReportWorldPosition) More... | |
| virtual void | ReportWorldPosition (CStdFPoint &oPoint) |
| Sets the reported world position (m_oReportWorldPosition) More... | |
| virtual void | ReportWorldPosition (float fltX, float fltY, float fltZ) |
| Sets the reported world position (m_oReportWorldPosition) More... | |
| virtual CStdFPoint | Rotation () |
| Gets the rotation of this body in radians. More... | |
| virtual void | Rotation (CStdFPoint &oPoint, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the rotation of this body in radians. (m_oRotation) More... | |
| virtual void | Rotation (float fltX, float fltY, float fltZ, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the rotation of this body in radians. (m_oRotation) More... | |
| virtual void | Rotation (std::string strXml, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the rotation of this body in radians. (m_oRotation). This method is primarily used by the GUI to reset the rotation using an xml data packet. More... | |
| virtual CStdFPoint | SelectedVertex () |
| Gets the relative position of the selected vertex. (m_vSelectedVertex) More... | |
| virtual void | SelectedVertex (CStdFPoint &vPoint, bool bFireChangeEvent=false, bool bUpdatePhysics=true) |
| Sets the relative position of the selected vertex. (m_vSelectedVertex) More... | |
| virtual void | SelectedVertex (float fltX, float fltY, float fltZ, bool bFireChangeEvent=false, bool bUpdatePhysics=true) |
| Sets the relative position of the selected vertex. (m_vSelectedVertex) More... | |
| virtual void | SetBoundingBox (int iIdx, float fltVal) |
| Sets one dimension of the bounding box. This does nothing for all parts except a mesh. More... | |
| virtual float | Shininess () |
| Gets the shininess. More... | |
| virtual void | Shininess (float fltVal) |
| Sets the shininess value. More... | |
| virtual float | SimulationAlpha () |
| Gets the simulation alpha. More... | |
| virtual void | SimulationAlpha (float fltVal) |
| Sets the simulation alpha. More... | |
| virtual CStdColor * | Specular () |
| Gets the specular color. More... | |
| virtual void | Specular (CStdColor &aryColor) |
| virtual void | Specular (float *aryColor) |
| Sets the Specular color. More... | |
| virtual void | Specular (std::string strXml) |
| Loads the Specular color from an XML data packet. More... | |
| virtual std::string | Texture () |
| Gets the texture filename. More... | |
| virtual void | Texture (std::string strValue) |
| Sets the Texture filename. More... | |
| virtual CStdFPoint | UpdateAbsolutePosition () |
| virtual void | UserDefinedDraggerRadius (float fltRadius) |
| User defined dragger radius. More... | |
| virtual float | UserDefinedDraggerRadius () |
| Gets the user defined dragger radius. More... | |
| virtual void | VisualSelectionModeChanged (int iNewMode) |
| Called when the visual selection mode changed in GUI. More... | |
| virtual int | VisualSelectionType () |
| Gets the visual selection type for this part. More... | |
Static Public Member Functions | |
| static Organism * | CastToDerived (AnimatBase *lpBase) |
| Static Public Member Functions inherited from AnimatSim::Environment::Structure | |
| static Structure * | CastToDerived (AnimatBase *lpBase) |
Protected Member Functions | |
| virtual RobotInterface * | AddRobotInterface (std::string strXml) |
| Creates and adds a robot interface control. More... | |
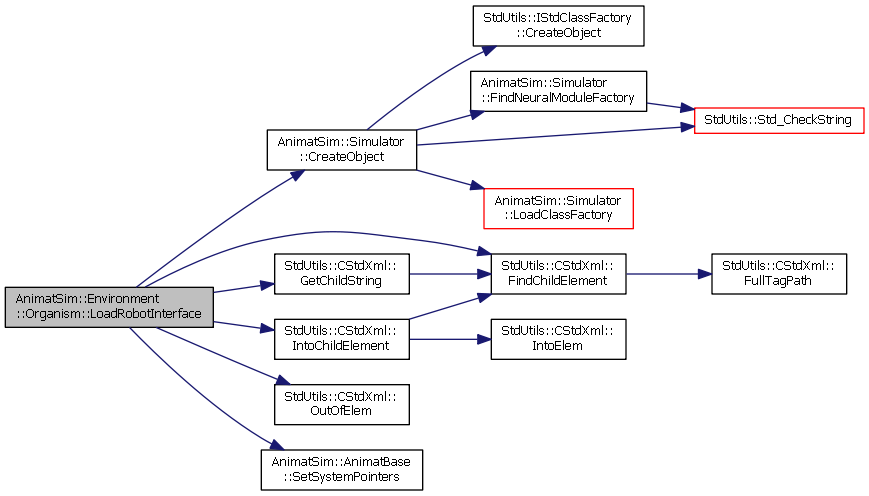
| virtual RobotInterface * | LoadRobotInterface (CStdXml &oXml) |
| Loads a robot interface Control. More... | |
| virtual void | RemoveRobotInterface (std::string strID, bool bThrowError=true) |
| Removes the robot interface with the specified ID. More... | |
| Protected Member Functions inherited from AnimatSim::Environment::Structure | |
| virtual void | AddRoot (std::string strXml) |
| Creates and adds a root body part. More... | |
| virtual void | AddScript (std::string strXml) |
| Creates and adds a scripting object to this structure. More... | |
| virtual void | LoadCollisionPair (CStdXml &oXml) |
| Loads a collision pair. More... | |
| virtual void | LoadLayout (CStdXml &oXml) |
| Loads the layout for this structure from an asl configuration file. More... | |
| virtual RigidBody * | LoadRoot (CStdXml &oXml) |
| Loads the root rigid body. More... | |
| virtual ScriptProcessor * | LoadScript (CStdXml &oXml) |
| Loads the script. More... | |
| virtual void | RemoveRoot (std::string strID, bool bThrowError=true) |
| Removes the root based on ID. More... | |
| virtual void | RemoveScript (std::string strID, bool bThrowError=true) |
| Removes the script based on ID. More... | |
| virtual void | UpdateData () |
| Collects reporting data for the structure at each time step. More... | |
| Protected Member Functions inherited from AnimatSim::Environment::MovableItem | |
| virtual void | LoadPosition (CStdXml &oXml) |
| Loads the items position. More... | |
| virtual void | LoadRotation (CStdXml &oXml) |
| Loads the items rotation. More... | |
Protected Attributes | |
| bool | m_bDead |
| Tells if the organism is dead or not. | |
| NervousSystem * | m_lpNervousSystem |
| The pointer to the nervous system. | |
| RobotInterface * | m_lpRobot |
| Pointer to a robot interface node to allow the organism to be hooked to a robot. | |
| Protected Attributes inherited from AnimatSim::Environment::Structure | |
| CStdPtrArray< CollisionPair > | m_aryExcludeCollisionList |
| This is the list of other body part ID's to exclude from collision tests. | |
| CStdMap< std::string, Joint * > | m_aryJoints |
| CStdMap< std::string, RigidBody * > | m_aryRigidBodies |
| float | m_fltSize |
| The radius of the graphical sphere shown for the structure position. | |
| RigidBody * | m_lpBody |
| The root rigid body object of this structure. | |
| IMovableItemCallback * | m_lpCallback |
| ScriptProcessor * | m_lpScript |
| Script processor for running python or other scripting systems related to this structure. | |
| Protected Attributes inherited from AnimatSim::AnimatBase | |
| bool | m_bEnabled |
| Tells if this item is enabled or not. If it is not enabled then it is not run. | |
| bool | m_bSelected |
| Tells whether the object is selected or not. | |
| AnimatSim::Behavior::NeuralModule * | m_lpModule |
| The pointer to this items parentNeuralModule. If this is not relevant for this object then this is NULL. | |
| Node * | m_lpNode |
| The pointer to this items parent Node. If this is not relevant for this object then this is NULL. | |
| Simulator * | m_lpSim |
| The pointer to a Simulation. | |
| AnimatSim::Environment::Structure * | m_lpStructure |
| The pointer to this items parent Structure. If this is not relevant for this object then this is NULL. | |
| std::string | m_strID |
| The unique Id for this object. | |
| std::string | m_strName |
| The name for this object. | |
| std::string | m_strType |
| The type for this object. Examples are Box, Plane, Neuron, etc.. | |
| Protected Attributes inherited from AnimatSim::Environment::MovableItem | |
| bool | m_bIsSelected |
| Keeps track of whether this movable item has been selected or not. | |
| bool | m_bIsVisible |
| float | m_fltAlpha |
| The current alpha transparency for this body part. | |
| float | m_fltCollisionsAlpha |
| The alpha transparency used in the Collisions VisualSelectionMode. | |
| float | m_fltGraphicsAlpha |
| The alpha transparency used in the Graphics VisualSelectionMode. | |
| float | m_fltJointsAlpha |
| The alpha transparency used in the Joints VisualSelectionMode. | |
| float | m_fltReceptiveFieldsAlpha |
| The alpha transparency used in the Receptive Fields VisualSelectionMode. | |
| float | m_fltReportIsVisible |
| float | m_fltShininess |
| The shininess of the part. A value between 0 and 128. | |
| float | m_fltSimulationAlpha |
| The alpha transparency used in the Simulation VisualSelectionMode. | |
| float | m_fltUserDefinedDraggerRadius |
| User defined drag handle radius. If this is -1 then the user has not set the value and the default is used. | |
| IMovableItemCallback * | m_lpCallback |
| Simulator * | m_lpMovableSim |
| The pointer to a Simulation. | |
| RigidBody * | m_lpParent |
| IPhysicsMovableItem * | m_lpPhysicsMovableItem |
| CStdFPoint | m_oAbsPosition |
| CStdFPoint | m_oPosition |
| These are rotation and position coords relative to the parent if this is a body part. | |
| CStdFPoint | m_oReportPosition |
| This is used for reporting the position back to the GUI. It is the position scaled for distance units. | |
| CStdFPoint | m_oReportRotation |
| CStdFPoint | m_oReportWorldPosition |
| This is used for reporting the position back to the GUI. It is the world position scaled for distance units. | |
| CStdFPoint | m_oRotation |
| std::string | m_strTexture |
| An optional texture to apply to the rigid body. | |
| CStdColor | m_vAmbient |
| The ambient color to apply to this part. It is specified as red, green, blue, and alpha. | |
| CStdColor | m_vDiffuse |
| The diffuse color to apply to this part. It is specified as red, green, blue, and alpha. | |
| CStdFPoint | m_vSelectedVertex |
| The relative position of the selected vertex. | |
| CStdColor | m_vSpecular |
| The specular color to apply to this part. It is specified as red, green, blue, and alpha. | |
A dynamic organism that is controlled by a neural network.
An organism is a type of Structure. The difference between an organism and a structure is the same as that between a crayfish and a rock. A crayfish is an object that thinks and can move on its own. To do this it uses its brain to control the movements of its muscles. So unlike a structure, an organism contains a neural network that is attached to the motor neurons to control the movements of the limbs, and to sensory neurons to detect signals from the environment. This allows it to produce independent behavior.
Definition at line 31 of file Organism.h.
| Organism::Organism | ( | ) |
Default constructor.
Definition at line 50 of file Organism.cpp.
References m_bDead, m_lpNervousSystem, and m_lpRobot.
|
virtual |
Destructor.
Definition at line 63 of file Organism.cpp.
References m_lpNervousSystem, m_lpRobot, and StdUtils::Std_TraceMsg().
Here is the call graph for this function:
|
virtual |
Adds a new object to this parent.
Generic method to add a new child item to this parent by specifying a string item type descriptor and an xml packet that can be used to load in the new object. The GUI uses this method to create new items that were added with the user interface. The item type lets the method determine what type of item is being created, like synapse, neuron, body part, etc.. It then gets the modulename, classname, and type from the xml and calls CreateObject to create the appropriate type of object. Then it passes in the xml packet to the new objects load method and does any needed initialization and adds it to the parent.
| strItemType | String descriptor of the type of item that is being created. |
| strXml | XML packet that is used to create and load the new item. |
| bThrowError | If true then throw an error if there is a problem, otherwise return false. |
Reimplemented from AnimatSim::Environment::Structure.
Definition at line 232 of file Organism.cpp.
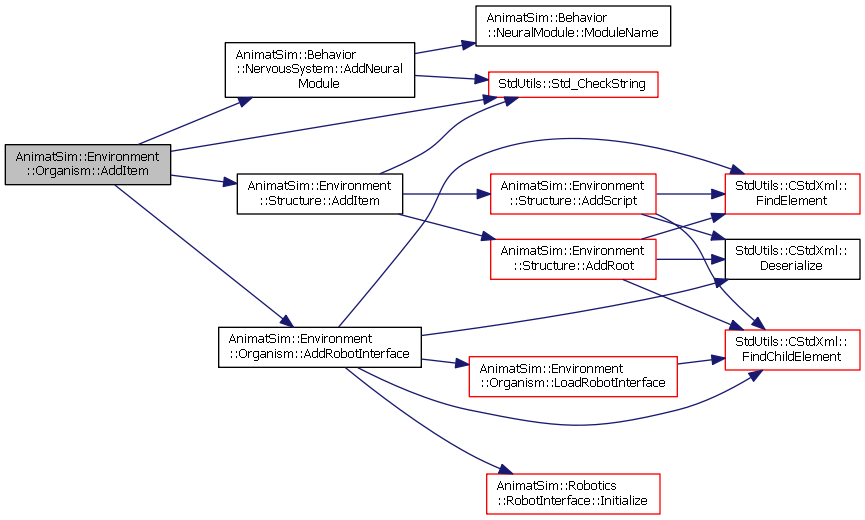
References AnimatSim::Environment::Structure::AddItem(), AnimatSim::Behavior::NervousSystem::AddNeuralModule(), AddRobotInterface(), m_lpNervousSystem, and StdUtils::Std_CheckString().
Here is the call graph for this function:
|
protectedvirtual |
Creates and adds a robot interface control.
| strXml | The xml data packet for loading the control node. |
Definition at line 199 of file Organism.cpp.
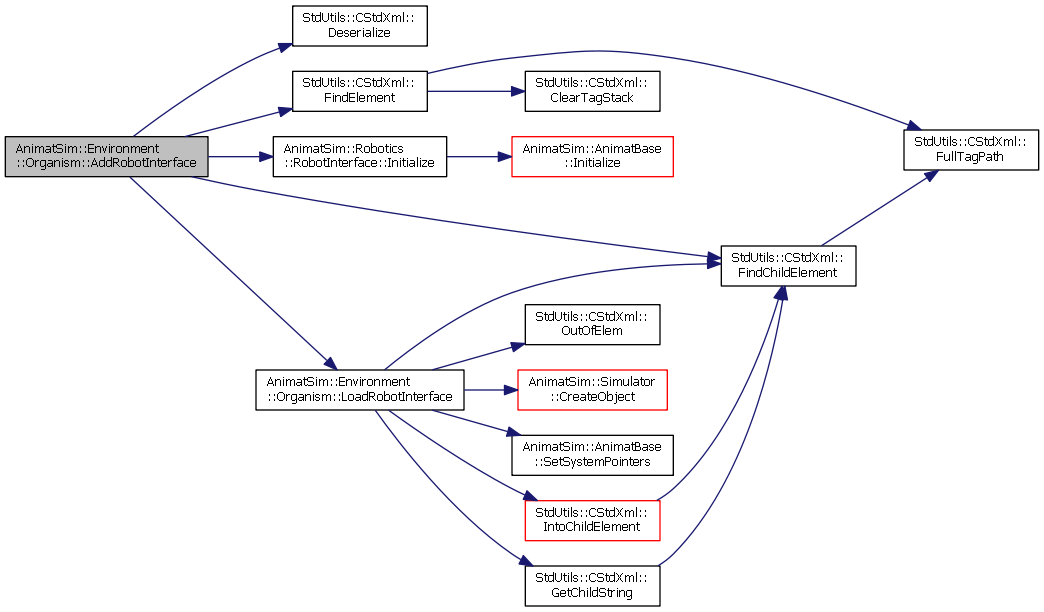
References StdUtils::CStdXml::Deserialize(), StdUtils::CStdXml::FindChildElement(), StdUtils::CStdXml::FindElement(), AnimatSim::Robotics::RobotInterface::Initialize(), and LoadRobotInterface().
Referenced by AddItem().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Calculates the snapshot byte size.
Sometimes the user may want to capture a snapshot of the simulation at a given point in time, and then be able to go back to that specific point. To do this we grab a snapshot of all the data in the system, including the neural variables. We essentially serialize the data into a binary format for later re-use. This method calculates the number of bytes that will be required to store the entire nervous system.
Reimplemented from AnimatSim::Environment::Structure.
Definition at line 315 of file Organism.cpp.
References AnimatSim::Behavior::NervousSystem::CalculateSnapshotByteSize(), and m_lpNervousSystem.
Here is the call graph for this function:
|
virtual |
Initializes this object.
After an object is loaded in it must be initialized before it can be used. This allows the object to retrieve any pointers or setup memory that it will need during execution. Each object is responsible for initializing any of its child objects, so you simply need to call this method on the containing class to init all child objects. It also calls VerifySystemPointers to make sure that the system pointers have been setup correctly.
Reimplemented from AnimatSim::Environment::Structure.
Definition at line 108 of file Organism.cpp.
References AnimatSim::Robotics::RobotInterface::Initialize(), AnimatSim::Behavior::NervousSystem::Initialize(), AnimatSim::Environment::Structure::Initialize(), m_lpNervousSystem, and m_lpRobot.
Here is the call graph for this function:
|
virtual |
Query if this object is dead.
Definition at line 92 of file Organism.cpp.
References m_bDead.
|
virtual |
Kills.
Called to kill the organism, nervous system, neurons, and body parts. All neural items are disabled to prevent any further neural activity, and all joints are disabled to allow free rotation, and all biomechancical components are disabled so they can no longer produce forces. This method is only relevant to these types of objects, but I am putting the definition in the base class because a variety of different types of classes all need this method and I want it consolidated. Those classes that do not need it do not have to call it or do anything when it is called.
| bState | true to state. |
Reimplemented from AnimatSim::Environment::Structure.
Definition at line 95 of file Organism.cpp.
References AnimatSim::Behavior::NervousSystem::Kill(), AnimatSim::Environment::Structure::Kill(), AnimatSim::Environment::RigidBody::Kill(), m_bDead, AnimatSim::Environment::Structure::m_lpBody, and m_lpNervousSystem.
Referenced by ResetSimulation(), and AnimatSim::Environment::Bodies::Stomach::StepSimulation().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Loads a key frame snapshot.
Sometimes the user may want to capture a snapshot of the simulation at a given point in time, and then be able to go back to that specific point. To do this we grab a snapshot of all the data in the system, including the neural variables. We essentially serialize the data into a binary format for later re-use. This method goes through each module and loads its data from the byte array.
| [in,out] | aryBytes | The array of bytes where the data is being stored. |
| [in,out] | lIndex | Current zero-based index of the read position in the array. |
Reimplemented from AnimatSim::Environment::Structure.
Definition at line 321 of file Organism.cpp.
References AnimatSim::Behavior::NervousSystem::LoadKeyFrameSnapshot(), and m_lpNervousSystem.
Here is the call graph for this function:
|
protectedvirtual |
Loads a robot interface Control.
| [in,out] | oXml | The xml data definition of the part to load. |
Definition at line 335 of file Organism.cpp.
References AnimatSim::Simulator::CreateObject(), StdUtils::CStdXml::FindChildElement(), StdUtils::CStdXml::GetChildString(), StdUtils::CStdXml::IntoChildElement(), AnimatSim::AnimatBase::m_lpModule, m_lpRobot, AnimatSim::AnimatBase::m_lpSim, StdUtils::CStdXml::OutOfElem(), and AnimatSim::AnimatBase::SetSystemPointers().
Referenced by AddRobotInterface().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Removes a child item from this parent.
This is a generic method that is used to delete a child object from this parent. The GUI uses this method to remove objects from the simulation that have been deleted in the UI. The item type lets the method determine what type of item is being deleted, like synapse, neuron, body part, etc.. The ID is then used to delete that specific item.
| strItemType | String descriptor of the type of item that is being created. |
| strID | Unique ID of the item that will be removed. |
| bThrowError | If true then throw an error if there is a problem, otherwise return false. |
Reimplemented from AnimatSim::Environment::Structure.
Definition at line 266 of file Organism.cpp.
References m_lpNervousSystem, AnimatSim::Environment::Structure::RemoveItem(), AnimatSim::Behavior::NervousSystem::RemoveNeuralModule(), RemoveRobotInterface(), and StdUtils::Std_CheckString().
Here is the call graph for this function:
|
protectedvirtual |
Removes the robot interface with the specified ID.
| strID | ID of the body to remove |
| bThrowError | If true and ID is not found then it will throw an error. |
| If | bThrowError is true and ID is not found. |
Definition at line 223 of file Organism.cpp.
References AnimatSim::AnimatBase::ID(), m_lpRobot, and StdUtils::Std_CheckString().
Referenced by RemoveItem().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
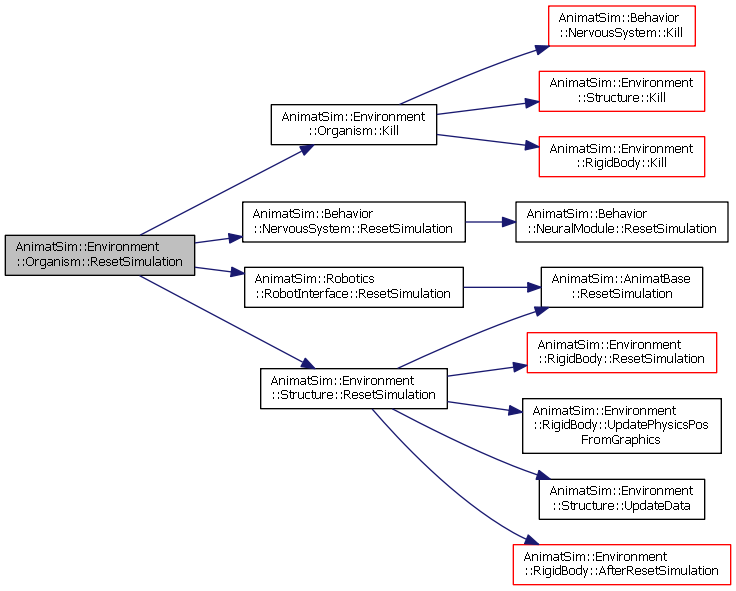
Resets the simulation back to time 0.
This method calls the ResetSimulation method on all subitems in order to reset the simulation back to the beginning.
Reimplemented from AnimatSim::Environment::Structure.
Reimplemented in VortexAnimatSim::Environment::VsOrganism, OsgAnimatSim::Environment::OsgOrganism, and RoboticsAnimatSim::Environment::RbOrganism.
Definition at line 119 of file Organism.cpp.
References Kill(), m_lpNervousSystem, m_lpRobot, AnimatSim::Behavior::NervousSystem::ResetSimulation(), AnimatSim::Robotics::RobotInterface::ResetSimulation(), and AnimatSim::Environment::Structure::ResetSimulation().
Here is the call graph for this function:
|
virtual |
Saves a key frame snapshot.
Sometimes the user may want to capture a snapshot of the simulation at a given point in time, and then be able to go back to that specific point. To do this we grab a snapshot of all the data in the system, including the neural variables. We essentially serialize the data into a binary format for later re-use. This method goes through each module and saves its data into the byte array.
| [in,out] | aryBytes | The array of bytes where the data is being stored. |
| [in,out] | lIndex | Current zero-based index of the write position in the array. |
Reimplemented from AnimatSim::Environment::Structure.
Definition at line 318 of file Organism.cpp.
References m_lpNervousSystem, and AnimatSim::Behavior::NervousSystem::SaveKeyFrameSnapshot().
Here is the call graph for this function:
|
virtual |
Set a variable based on a string data type name.
This is a generic method that can be used to set any variable in an AnimatBase object by specifying the name of the variable and a string representation of that data. The GUI uses this method to set data into variables in the simulation when the user changes them in the UI. The value string can be as simple as a float or int, or as complex as an xml packet. It is the developers responsibilty to know what type of data is needed and to process it accordingly.
| strDataType | string name of the data type to set. |
| strValue | The string value of the data. It is up to the developer to determine what this should be. For example, in most cases it is simply a float and you just have to convert it to a float and make the appropriate mutator method call. However, it can be any type of string, including an entire xml packet. It is the developers responsibility to know how to set and process the data as required. |
| bThrowError | true to throw error if there is a problem. If false then it will not return an error, just return false. |
Reimplemented from AnimatSim::Environment::Structure.
Definition at line 170 of file Organism.cpp.
References AnimatSim::Environment::Structure::SetData(), and StdUtils::Std_CheckString().
Here is the call graph for this function:
|
virtual |
Step neural engine.
Definition at line 141 of file Organism.cpp.
References m_bDead, m_lpNervousSystem, AnimatSim::Environment::Structure::m_lpScript, and AnimatSim::Behavior::NervousSystem::StepSimulation().
Referenced by AnimatSim::Simulator::StepNeuralEngine().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
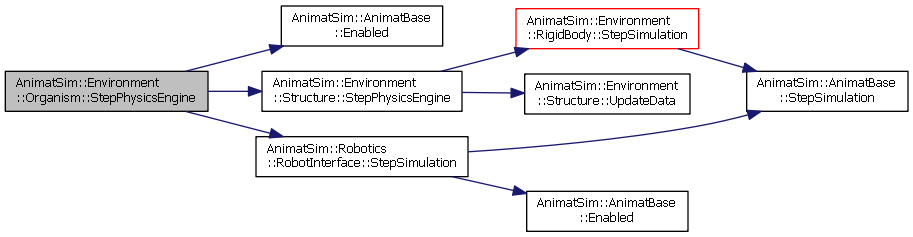
Allows the organism and its parts to update at each time slice.
This function is called for each structure/organism at every time slice. It gives the structures a chance to update any values. For instance, the hydrodynamic simulation code needs to manually add drag and buoyancy forces to each rigid body every time slice. You need to be VERY careful to keep all code within the StepSimulation methods short, sweet, and very fast. They are in the main processing loop and even a small increase in the amount of processing time that occurrs within this loop will lead to major impacts on the ultimate performance of the system.
Reimplemented from AnimatSim::Environment::Structure.
Definition at line 155 of file Organism.cpp.
References AnimatSim::AnimatBase::Enabled(), m_lpRobot, AnimatSim::Environment::Structure::StepPhysicsEngine(), and AnimatSim::Robotics::RobotInterface::StepSimulation().
Here is the call graph for this function: 1.8.10
1.8.10