|
AnimatLab
2
Test
|
|
AnimatLab
2
Test
|
Implements a basic PID control algorithm. More...
#include <StdPID.h>
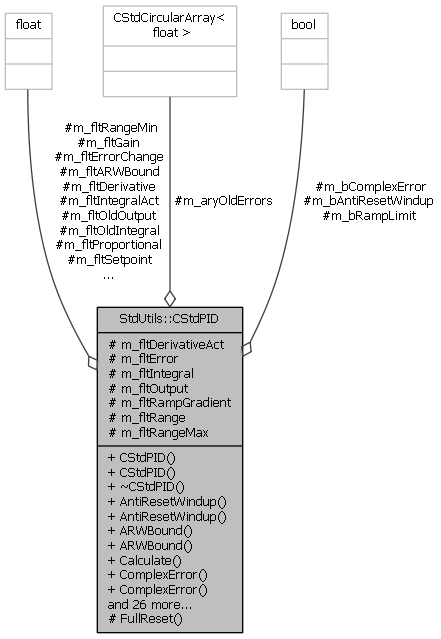
 Collaboration diagram for StdUtils::CStdPID:
Collaboration diagram for StdUtils::CStdPID:Public Member Functions | |
| CStdPID (float fltSetpoint, float fltGain, float fltIntegralAct, float fltDerivativeAct, bool bComplexError, bool bAntiResetWindup, bool bRampLimit, float fltRangeMax, float fltRangeMin, float fltARWBound, float fltRampGradient) | |
| virtual void | AntiResetWindup (bool bVal) |
| virtual bool | AntiResetWindup () |
| virtual void | ARWBound (float fltVal) |
| Sets the anti-reset boundary. This is specified as a percentage of the entire output range. A limit of zero percent would make output ARW impossible and a limit of 50 percent or greater would allow maximum ARW. More... | |
| virtual float | ARWBound () |
| virtual float | Calculate (float fltDt, float fltInput) |
| virtual void | ComplexError (bool bVal) |
| virtual bool | ComplexError () |
| virtual float | Derivative () |
| virtual void | DerivativeAct (float fltVal) |
| virtual float | DerivativeAct () |
| virtual float | Error () |
| virtual float | ErrorChange () |
| virtual void | Gain (float fltVal) |
| virtual float | Gain () |
| virtual float | Integral () |
| virtual void | IntegralAct (float fltVal) |
| virtual float | IntegralAct () |
| virtual float | OldIntegral () |
| virtual float | OldOutput () |
| virtual float | Output () |
| virtual float | Proportional () |
| virtual void | RampGradient (float fltVal) |
| Ramp gradient. More... | |
| virtual float | RampGradient () |
| virtual void | RampLimit (bool bVal) |
| virtual bool | RampLimit () |
| virtual float | Range () |
| virtual void | RangeMax (float fltVal) |
| virtual float | RangeMax () |
| virtual void | RangeMin (float fltVal) |
| virtual float | RangeMin () |
| virtual void | ResetVars () |
| virtual void | Setpoint (float fltVal) |
| virtual float | Setpoint () |
Protected Member Functions | |
| virtual void | FullReset () |
|
virtual |
Sets the anti-reset boundary. This is specified as a percentage of the entire output range. A limit of zero percent would make output ARW impossible and a limit of 50 percent or greater would allow maximum ARW.
| fltVal | The new value. |
Definition at line 190 of file StdPID.cpp.
|
virtual |
Ramp gradient.
| fltVal | The new degree value. |
Definition at line 206 of file StdPID.cpp.
 1.8.10
1.8.10