|
AnimatLab
2
Test
|
|
AnimatLab
2
Test
|
A common class for all rigid body data specific to vortex. More...
#include <VsRigidBody.h>
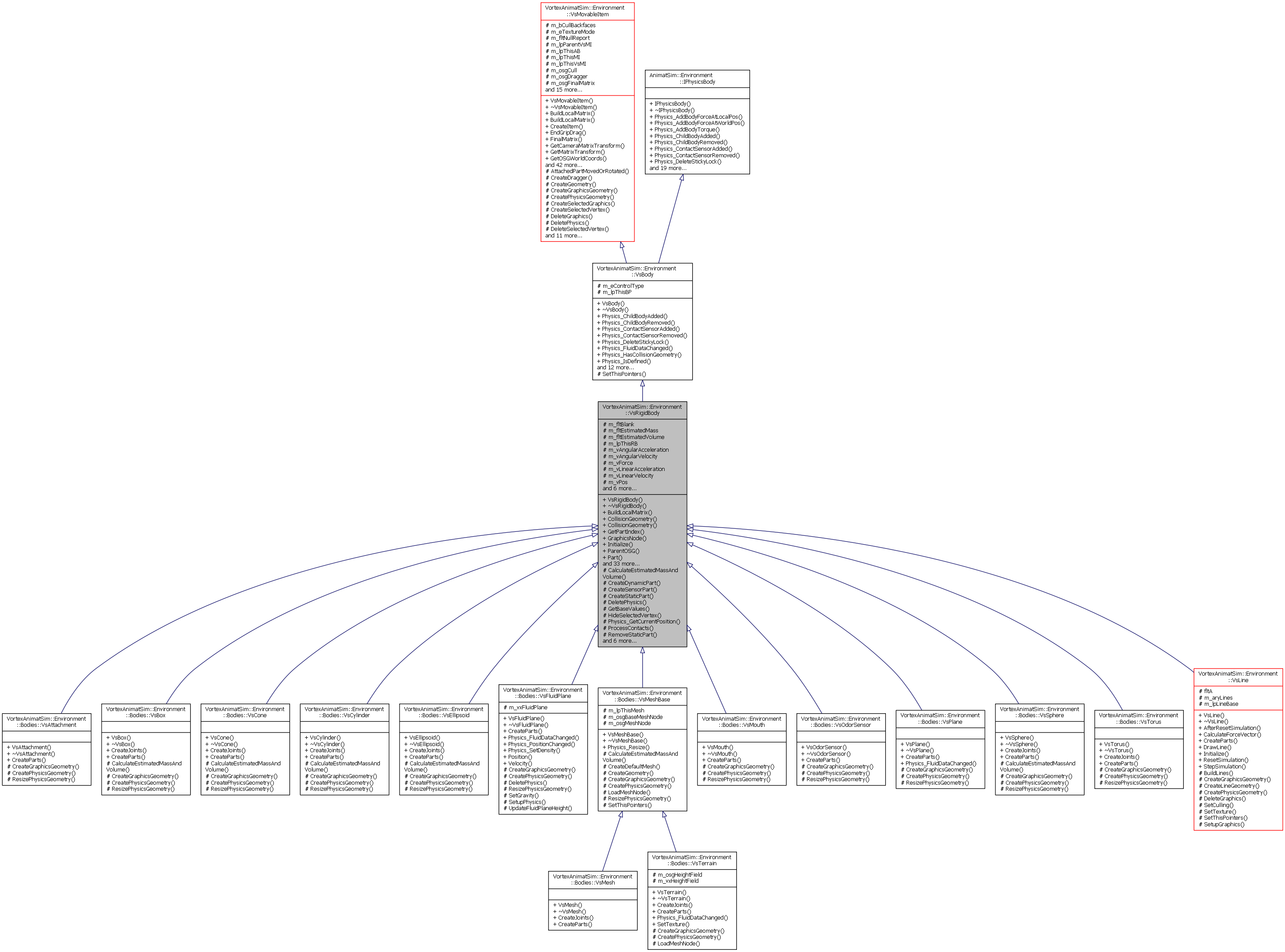
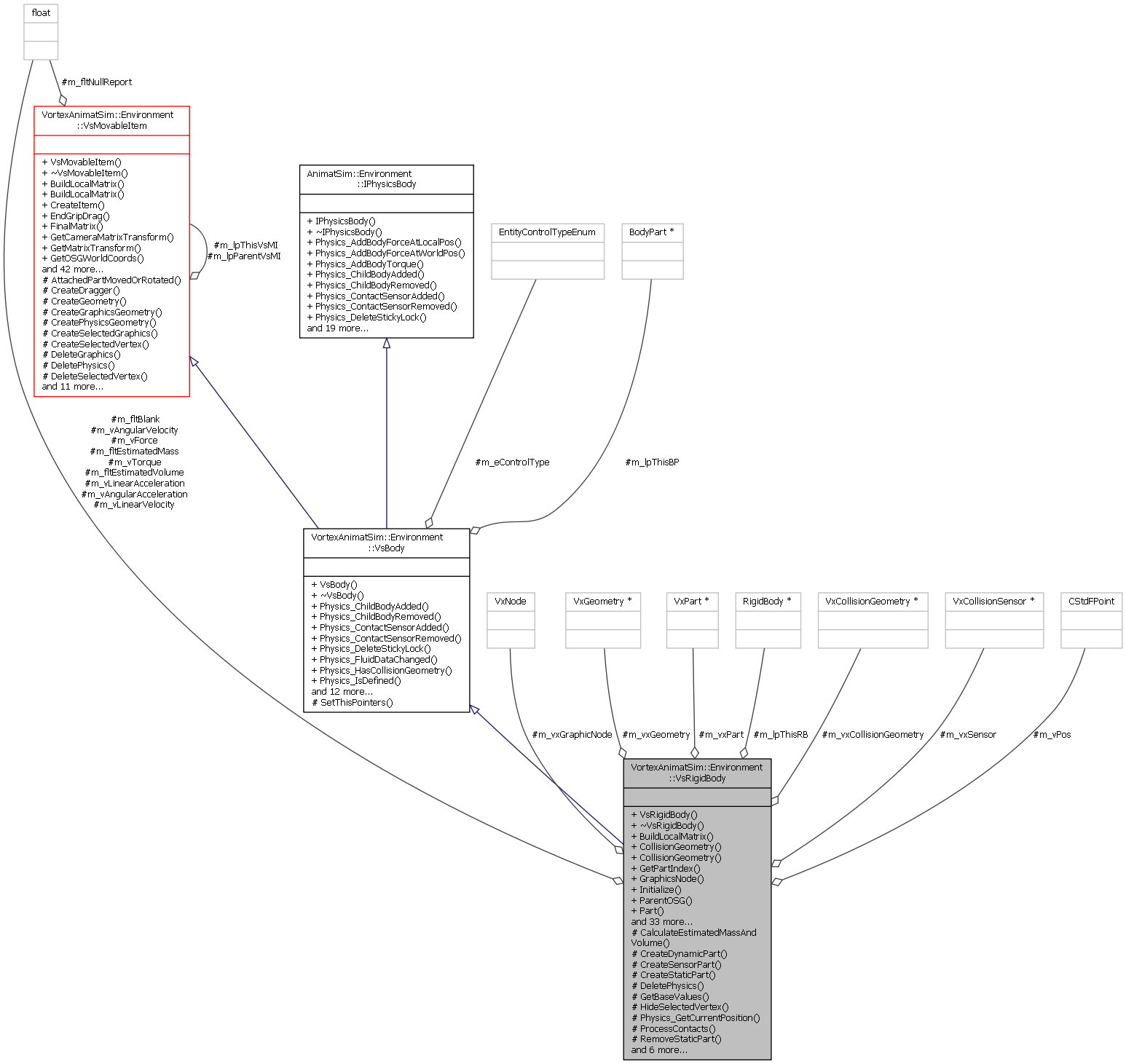
 Inheritance diagram for VortexAnimatSim::Environment::VsRigidBody: Collaboration diagram for VortexAnimatSim::Environment::VsRigidBody:
Inheritance diagram for VortexAnimatSim::Environment::VsRigidBody: Collaboration diagram for VortexAnimatSim::Environment::VsRigidBody:Public Member Functions | |
| virtual void | BuildLocalMatrix () |
| Builds the local matrix. More... | |
| Vx::VxCollisionGeometry * | CollisionGeometry () |
| virtual void | CollisionGeometry (Vx::VxCollisionGeometry *vxGeometry) |
| virtual int | GetPartIndex (VxPart *vxP0, VxPart *vxP1) |
| Vx::VxNode | GraphicsNode () |
| virtual void | Initialize () |
| virtual osg::Group * | ParentOSG () |
| Gets the parent osg node. More... | |
| Vx::VxPart * | Part () |
| virtual void | Physics_AddBodyForceAtLocalPos (float fltPx, float fltPy, float fltPz, float fltFx, float fltFy, float fltFz, bool bScaleUnits) |
| virtual void | Physics_AddBodyForceAtWorldPos (float fltPx, float fltPy, float fltPz, float fltFx, float fltFy, float fltFz, bool bScaleUnits) |
| virtual void | Physics_AddBodyTorque (float fltTx, float fltTy, float fltTz, bool bScaleUnits) |
| virtual void | Physics_CollectData () |
| virtual void | Physics_CollectExtraData () |
| virtual void | Physics_DisableCollision (RigidBody *lpBody) |
| virtual void | Physics_EnableCollision (RigidBody *lpBody) |
| virtual void | Physics_FluidDataChanged () |
| virtual float * | Physics_GetDataPointer (const std::string &strDataType) |
| virtual float | Physics_GetDensity () |
| virtual float | Physics_GetMass () |
| virtual CStdFPoint | Physics_GetVelocityAtPoint (float x, float y, float z) |
| virtual bool | Physics_HasCollisionGeometry () |
| virtual bool | Physics_IsDefined () |
| virtual bool | Physics_IsGeometryDefined () |
| virtual void | Physics_ResetSimulation () |
| virtual void | Physics_Resize () |
| virtual void | Physics_ResizeSelectedReceptiveFieldVertex () |
| virtual void | Physics_SelectedVertex (float fltXPos, float fltYPos, float fltZPos) |
| virtual void | Physics_SetCenterOfMass (float fltTx, float fltTy, float fltTz) |
| virtual void | Physics_SetColor () |
| virtual void | Physics_SetDensity (float fltVal) |
| virtual void | Physics_SetFreeze (bool bVal) |
| virtual void | Physics_SetMass (float fltVal) |
| virtual void | Physics_SetMaterialID (std::string strID) |
| virtual void | Physics_SetVelocityDamping (float fltLinear, float fltAngular) |
| virtual void | Physics_TextureChanged () |
| virtual void | Physics_UpdateMatrix () |
| virtual void | Physics_UpdateNode () |
| virtual void | Physics_WakeDynamics () |
| Vx::VxCollisionSensor * | Sensor () |
| virtual void | SetBody () |
| virtual void | SetupPhysics () |
| Public Member Functions inherited from VortexAnimatSim::Environment::VsBody | |
| VsBody () | |
| Default constructor. More... | |
| virtual | ~VsBody () |
| Destructor. More... | |
| virtual void | Physics_ChildBodyAdded (RigidBody *lpChild) |
| virtual void | Physics_ChildBodyRemoved (bool bHasStaticJoint) |
| virtual void | Physics_ContactSensorAdded (ContactSensor *lpSensor) |
| virtual void | Physics_ContactSensorRemoved () |
| virtual void | Physics_DeleteStickyLock () |
| virtual void | Physics_StepHydrodynamicSimulation () |
| Public Member Functions inherited from VortexAnimatSim::Environment::VsMovableItem | |
| virtual void | BuildLocalMatrix (CStdFPoint localPos, CStdFPoint localRot, std::string strName) |
| virtual void | CreateItem () |
| virtual void | EndGripDrag () |
| virtual osg::Matrix | FinalMatrix () |
| virtual osg::MatrixTransform * | GetCameraMatrixTransform () |
| Gets the matrix transform used by the camera for the mouse spring. More... | |
| virtual osg::MatrixTransform * | GetMatrixTransform () |
| virtual CStdFPoint | GetOSGWorldCoords () |
| virtual osg::Matrix | GetOSGWorldMatrix (bool bUpdate=false) |
| virtual osg::Matrix | GetParentWorldMatrix () |
| virtual VsSimulator * | GetVsSimulator () |
| virtual osg::Matrix | GetWorldMatrix () |
| virtual osg::Matrix | LocalMatrix () |
| virtual osg::Group * | NodeGroup () |
| virtual void | Physics_AfterResetSimulation () |
| virtual bool | Physics_CalculateLocalPosForWorldPos (float fltWorldX, float fltWorldY, float fltWorldZ, CStdFPoint &vLocalPos) |
| virtual BoundingBox | Physics_GetBoundingBox () |
| virtual float | Physics_GetBoundingRadius () |
| virtual std::string | Physics_GetLocalTransformMatrixString () |
| virtual std::string | Physics_ID () |
| virtual void | Physics_LoadLocalTransformMatrix (CStdXml &oXml) |
| virtual void | Physics_OrientNewPart (float fltXPos, float fltYPos, float fltZPos, float fltXNorm, float fltYNorm, float fltZNorm) |
| virtual void | Physics_PositionChanged () |
| virtual void | Physics_ResetGraphicsAndPhysics () |
| virtual void | Physics_ResizeDragHandler (float fltRadius) |
| virtual void | Physics_RotationChanged () |
| virtual void | Physics_SaveLocalTransformMatrix (CStdXml &oXml) |
| virtual void | Physics_Selected (bool bValue, bool bSelectMultiple) |
| virtual void | Physics_SetChild (MovableItem *lpParent) |
| virtual void | Physics_SetParent (MovableItem *lpParent) |
| virtual void | Physics_UpdateAbsolutePosition () |
| virtual osg::Group * | RootGroup () |
| virtual void | SetAlpha () |
| virtual void | SetColor (CStdColor &vAmbient, CStdColor &vDiffuse, CStdColor &vSpecular, float fltShininess) |
| virtual void | SetCulling () |
| virtual void | SetMaterialAlpha (osg::Material *osgMat, osg::StateSet *ss, float fltAlpha) |
| virtual void | SetTexture (std::string strTexture) |
| virtual void | SetVisible (bool bVisible) |
| virtual void | SetVisible (osg::Node *osgNode, bool bVisible) |
| virtual VsMovableItem * | VsParent () |
| virtual void | WorldToBodyCoords (VxReal3 vWorldPos, StdVector3 &vLocalPos) |
| Public Member Functions inherited from AnimatSim::Environment::IPhysicsMovableItem | |
| virtual void | Physics_SetChild (MovableItem *lpChild)=0 |
| virtual void | Physics_SetParent (MovableItem *lpParent)=0 |
| Public Member Functions inherited from AnimatSim::Environment::IPhysicsBody | |
| virtual void | Physics_ChildBodyAdded (RigidBody *lpChild)=0 |
| virtual void | Physics_ContactSensorAdded (ContactSensor *lpSensor)=0 |
| virtual void | Physics_DisableCollision (RigidBody *lpBody)=0 |
| virtual void | Physics_EnableCollision (RigidBody *lpBody)=0 |
Protected Member Functions | |
| virtual void | CalculateEstimatedMassAndVolume () |
| virtual void | CreateDynamicPart () |
| virtual void | CreateSensorPart () |
| virtual void | CreateStaticPart () |
| virtual void | DeletePhysics () |
| virtual void | GetBaseValues () |
| virtual void | HideSelectedVertex () |
| CStdFPoint | Physics_GetCurrentPosition () |
| virtual void | ProcessContacts () |
| virtual void | RemoveStaticPart () |
| virtual void | ResetSensorCollisionGeom () |
| virtual void | ResetStaticCollisionGeom () |
| virtual void | SetFollowEntity (VsRigidBody *lpEntity) |
| virtual void | SetThisPointers () |
| virtual void | ShowSelectedVertex () |
| virtual void | UpdatePositionAndRotationFromMatrix () |
| Protected Member Functions inherited from VortexAnimatSim::Environment::VsMovableItem | |
| virtual void | AttachedPartMovedOrRotated (std::string strID) |
| virtual void | CreateDragger (std::string strName) |
| virtual void | CreateGeometry () |
| virtual void | CreateGraphicsGeometry () |
| virtual void | CreatePhysicsGeometry () |
| virtual void | CreateSelectedGraphics (std::string strName) |
| virtual void | CreateSelectedVertex (std::string strName) |
| virtual void | DeleteGraphics () |
| virtual void | DeleteSelectedVertex () |
| virtual void | GeometryRotationMatrix (osg::Matrix osgGeometryMT) |
| virtual void | LocalMatrix (osg::Matrix osgLocalMT) |
| virtual void | ResizePhysicsGeometry () |
| virtual void | SetupGraphics () |
| virtual void | UpdatePositionAndRotationFromMatrix (osg::Matrix osgMT) |
| virtual void | UpdateWorldMatrix () |
Protected Attributes | |
| float | m_fltBlank |
| float | m_fltEstimatedMass |
| float | m_fltEstimatedVolume |
| The estimated volume. See m_fltEstimatedMass desciption. | |
| RigidBody * | m_lpThisRB |
| float | m_vAngularAcceleration [3] |
| float | m_vAngularVelocity [3] |
| float | m_vForce [3] |
| float | m_vLinearAcceleration [3] |
| float | m_vLinearVelocity [3] |
| CStdFPoint | m_vPos |
| float | m_vTorque [3] |
| VxCollisionGeometry * | m_vxCollisionGeometry |
| VxGeometry * | m_vxGeometry |
| VxNode | m_vxGraphicNode |
| VxPart * | m_vxPart |
| VxCollisionSensor * | m_vxSensor |
| Protected Attributes inherited from VortexAnimatSim::Environment::VsBody | |
| Vx::VxEntity::EntityControlTypeEnum | m_eControlType |
| BodyPart * | m_lpThisBP |
| Protected Attributes inherited from VortexAnimatSim::Environment::VsMovableItem | |
| bool | m_bCullBackfaces |
| osg::StateAttribute::GLMode | m_eTextureMode |
| float | m_fltNullReport |
| This is used to report back 0 from GetDataPointer for items that are not supported in vortex. | |
| VsMovableItem * | m_lpParentVsMI |
| AnimatBase * | m_lpThisAB |
| MovableItem * | m_lpThisMI |
| VsMovableItem * | m_lpThisVsMI |
| osg::ref_ptr< osg::CullFace > | m_osgCull |
| osg::ref_ptr< VsDragger > | m_osgDragger |
| osg::Matrix | m_osgFinalMatrix |
| osg::ref_ptr< osg::Geometry > | m_osgGeometry |
| osg::ref_ptr< osg::MatrixTransform > | m_osgGeometryRotationMT |
| osg::Matrix | m_osgLocalMatrix |
| osg::ref_ptr< osg::Material > | m_osgMaterial |
| osg::ref_ptr< osgManipulator::Selection > | m_osgMT |
| osg::ref_ptr< osg::Node > | m_osgNode |
| osg::ref_ptr< osg::Group > | m_osgNodeGroup |
| osg::ref_ptr< osg::Group > | m_osgParent |
| osg::ref_ptr< osg::Group > | m_osgRoot |
| osg::ref_ptr< osg::Group > | m_osgSelectedGroup |
| osg::ref_ptr< osg::MatrixTransform > | m_osgSelVertexMT |
| osg::ref_ptr< osg::Geode > | m_osgSelVertexNode |
| osg::ref_ptr< osg::StateSet > | m_osgStateSet |
| osg::ref_ptr< osg::Texture2D > | m_osgTexture |
| osg::Matrix | m_osgWorldMatrix |
A common class for all rigid body data specific to vortex.
Definition at line 55 of file VsRigidBody.h.
|
virtual |
Builds the local matrix.
If this is the root object then use the world coordinates of the structure instead of the local coordinates of the rigid body.
Reimplemented from VortexAnimatSim::Environment::VsMovableItem.
Definition at line 346 of file VsRigidBody.cpp.
|
virtual |
Gets the parent osg node.
If this is the root object then attach it directly to the OSG root node because we are building its local matrix using the structures absolute position. This is so the vortex stuff works correctly, and so that you can move the structure by moving the root body.
Implements VortexAnimatSim::Environment::VsMovableItem.
Definition at line 370 of file VsRigidBody.cpp.
|
protected |
Used to send back 0 for variables that are supported in other physics engines but not in this one.
Definition at line 96 of file VsRigidBody.h.
|
protected |
Static parts do not have their mass/volume computed for them by vortex. This presents a problem when trying to convert them to another physics engine like bullet that uses mass instead. When we are saving out the mass of the part then we need to be able to get some reliable estimate of what it is if it is static. We use these estimations for that purpose.
Definition at line 89 of file VsRigidBody.h.
 1.8.10
1.8.10