|
AnimatLab
2
Test
|
|
AnimatLab
2
Test
|
A common class for all rigid body data specific to vortex. More...
#include <RbRigidBody.h>
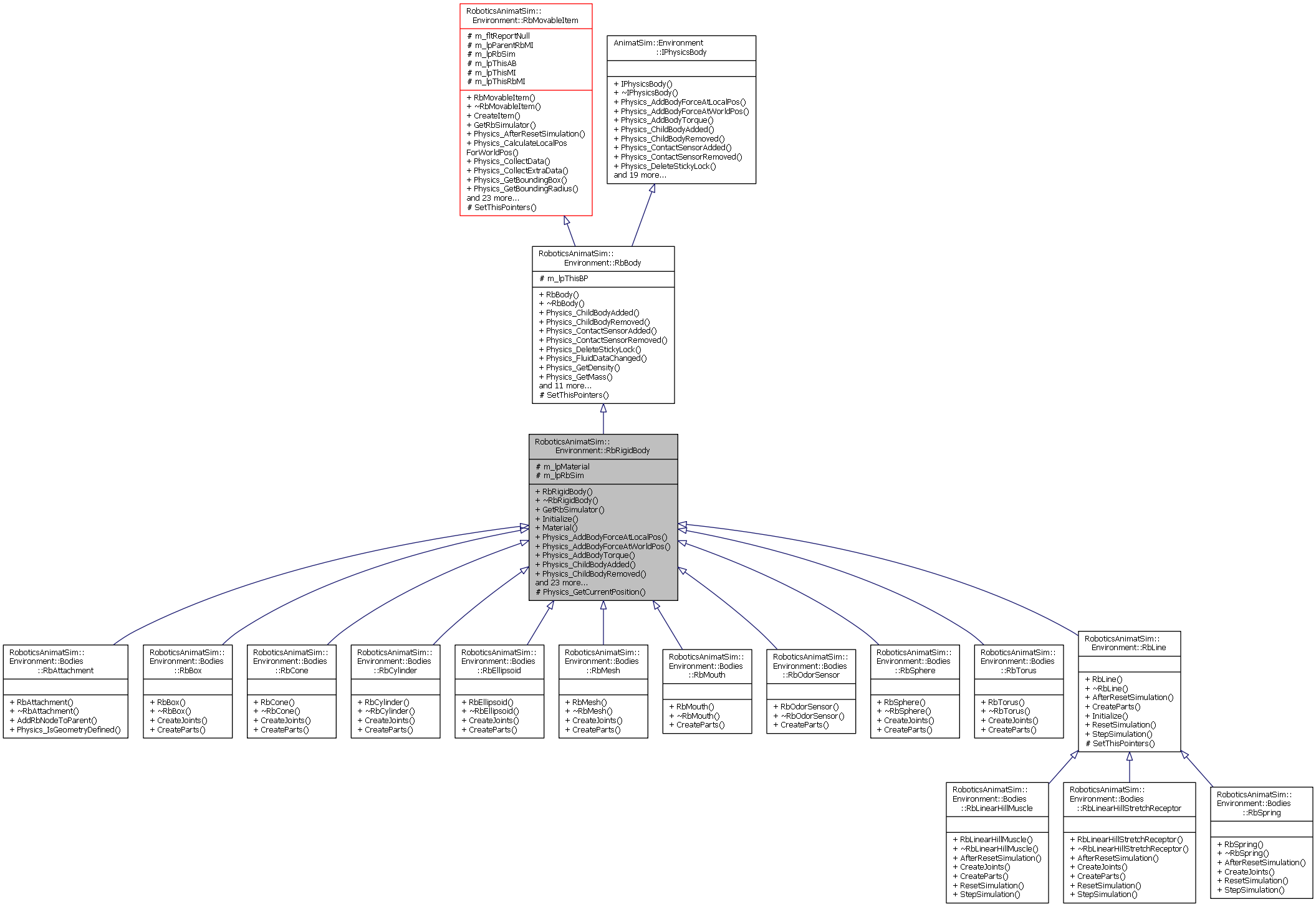
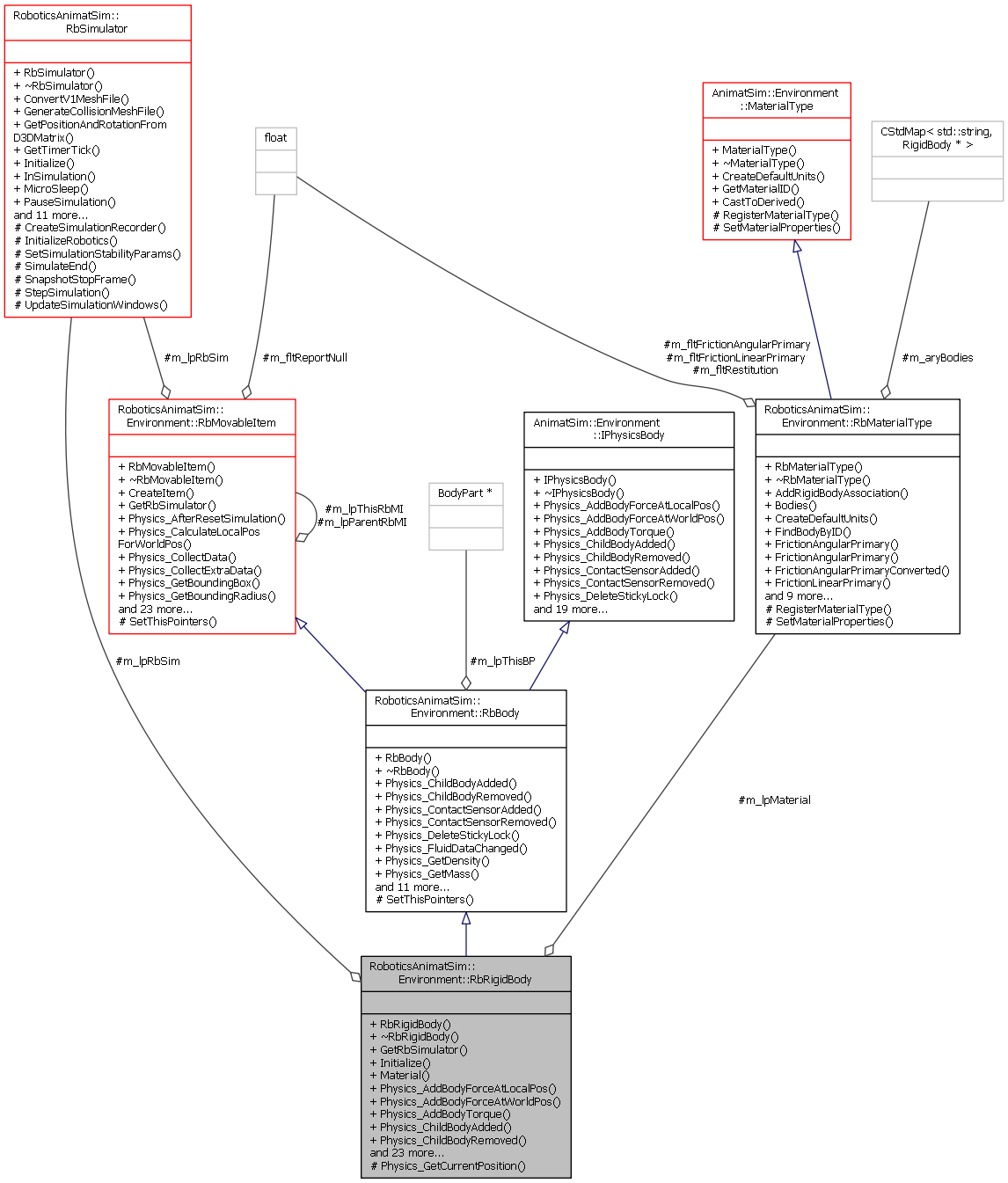
 Inheritance diagram for RoboticsAnimatSim::Environment::RbRigidBody: Collaboration diagram for RoboticsAnimatSim::Environment::RbRigidBody:
Inheritance diagram for RoboticsAnimatSim::Environment::RbRigidBody: Collaboration diagram for RoboticsAnimatSim::Environment::RbRigidBody:Public Member Functions | |
| virtual RbSimulator * | GetRbSimulator () |
| virtual void | Initialize () |
| RbMaterialType * | Material () |
| virtual void | Physics_AddBodyForceAtLocalPos (float fltPx, float fltPy, float fltPz, float fltFx, float fltFy, float fltFz, bool bScaleUnits) |
| virtual void | Physics_AddBodyForceAtWorldPos (float fltPx, float fltPy, float fltPz, float fltFx, float fltFy, float fltFz, bool bScaleUnits) |
| virtual void | Physics_AddBodyTorque (float fltTx, float fltTy, float fltTz, bool bScaleUnits) |
| virtual void | Physics_ChildBodyAdded (RigidBody *lpChild) |
| virtual void | Physics_ChildBodyRemoved (bool bHasStaticJoint) |
| virtual void | Physics_CollectData () |
| virtual void | Physics_CollectExtraData () |
| virtual void | Physics_ContactSensorAdded (ContactSensor *lpSensor) |
| virtual void | Physics_ContactSensorRemoved () |
| virtual void | Physics_DisableCollision (RigidBody *lpBody) |
| virtual void | Physics_EnableCollision (RigidBody *lpBody) |
| virtual void | Physics_FluidDataChanged () |
| virtual float * | Physics_GetDataPointer (const std::string &strDataType) |
| virtual float | Physics_GetDensity () |
| virtual float | Physics_GetMass () |
| virtual CStdFPoint | Physics_GetVelocityAtPoint (float x, float y, float z) |
| virtual bool | Physics_HasCollisionGeometry () |
| virtual bool | Physics_IsDefined () |
| virtual bool | Physics_IsGeometryDefined () |
| virtual void | Physics_ResetSimulation () |
| virtual void | Physics_SetCenterOfMass (float fltTx, float fltTy, float fltTz) |
| virtual void | Physics_SetFreeze (bool bVal) |
| virtual void | Physics_SetMass (float fltVal) |
| virtual void | Physics_SetMaterialID (std::string strID) |
| virtual void | Physics_SetVelocityDamping (float fltLinear, float fltAngular) |
| virtual void | Physics_StepHydrodynamicSimulation () |
| virtual void | Physics_UpdateNode () |
| virtual void | Physics_WakeDynamics () |
| Public Member Functions inherited from RoboticsAnimatSim::Environment::RbBody | |
| RbBody () | |
| Default constructor. More... | |
| virtual | ~RbBody () |
| Destructor. More... | |
| virtual void | Physics_DeleteStickyLock () |
| virtual void | Physics_ResizeSelectedReceptiveFieldVertex () |
| virtual void | Physics_SetDensity (float fltVal) |
| Public Member Functions inherited from RoboticsAnimatSim::Environment::RbMovableItem | |
| virtual void | CreateItem () |
| virtual void | Physics_AfterResetSimulation () |
| virtual bool | Physics_CalculateLocalPosForWorldPos (float fltWorldX, float fltWorldY, float fltWorldZ, CStdFPoint &vLocalPos) |
| virtual BoundingBox | Physics_GetBoundingBox () |
| virtual float | Physics_GetBoundingRadius () |
| virtual std::string | Physics_GetLocalTransformMatrixString () |
| virtual std::string | Physics_ID () |
| virtual void | Physics_LoadLocalTransformMatrix (CStdXml &oXml) |
| virtual void | Physics_OrientNewPart (float fltXPos, float fltYPos, float fltZPos, float fltXNorm, float fltYNorm, float fltZNorm) |
| virtual void | Physics_PositionChanged () |
| virtual void | Physics_ResetGraphicsAndPhysics () |
| virtual void | Physics_Resize (void) |
| virtual void | Physics_ResizeDragHandler (float fltRadius) |
| virtual void | Physics_RotationChanged () |
| virtual void | Physics_SaveLocalTransformMatrix (CStdXml &oXml) |
| virtual void | Physics_Selected (bool bValue, bool bSelectMultiple) |
| virtual void | Physics_SelectedVertex (float fltXPos, float fltYPos, float fltZPos) |
| virtual void | Physics_SetChild (MovableItem *lpParent) |
| virtual void | Physics_SetColor () |
| virtual void | Physics_SetParent (MovableItem *lpParent) |
| virtual void | Physics_TextureChanged () |
| virtual void | Physics_UpdateAbsolutePosition () |
| virtual void | Physics_UpdateMatrix () |
| virtual RbMovableItem * | RbParent () |
| virtual void | SetAlpha () |
| virtual void | SetVisible (bool) |
| Public Member Functions inherited from AnimatSim::Environment::IPhysicsMovableItem | |
| virtual void | Physics_SetChild (MovableItem *lpChild)=0 |
| virtual void | Physics_SetParent (MovableItem *lpParent)=0 |
| Public Member Functions inherited from AnimatSim::Environment::IPhysicsBody | |
| virtual void | Physics_ChildBodyAdded (RigidBody *lpChild)=0 |
| virtual void | Physics_ContactSensorAdded (ContactSensor *lpSensor)=0 |
| virtual void | Physics_DisableCollision (RigidBody *lpBody)=0 |
| virtual void | Physics_EnableCollision (RigidBody *lpBody)=0 |
Protected Member Functions | |
| CStdFPoint | Physics_GetCurrentPosition () |
| Protected Member Functions inherited from RoboticsAnimatSim::Environment::RbBody | |
| virtual void | SetThisPointers () |
Protected Attributes | |
| RbMaterialType * | m_lpMaterial |
| The pointer to the material for this body. | |
| RbSimulator * | m_lpRbSim |
| Protected Attributes inherited from RoboticsAnimatSim::Environment::RbBody | |
| BodyPart * | m_lpThisBP |
| Protected Attributes inherited from RoboticsAnimatSim::Environment::RbMovableItem | |
| float | m_fltReportNull |
| Used to report back nulls. | |
| RbMovableItem * | m_lpParentRbMI |
| RbSimulator * | m_lpRbSim |
| AnimatBase * | m_lpThisAB |
| MovableItem * | m_lpThisMI |
| RbMovableItem * | m_lpThisRbMI |
Friends | |
| class | RbJoint |
A common class for all rigid body data specific to vortex.
Definition at line 52 of file RbRigidBody.h.
 1.8.10
1.8.10