|
|
virtual void | AddFluidPlane (FluidPlane *lpPlane) |
| |
|
virtual void | AngularCompliance (float fltVal, bool bUseScaling=true) |
| |
|
virtual void | AngularDamping (float fltVal, bool bUseScaling=true) |
| |
|
virtual void | AngularKineticLoss (float fltVal, bool bUseScaling=true) |
| |
|
btBroadphaseInterface * | BroadPhase () |
| |
|
void | BulletStepFinished (btScalar timeStep) |
| |
|
btDefaultCollisionConfiguration * | CollisionConfig () |
| |
|
virtual void | ConvertV1MeshFile (std::string strOriginalMeshFile, std::string strNewMeshFile, std::string strTexture) |
| |
|
btCollisionDispatcher * | Dispatcher () |
| |
|
btDiscreteDynamicsWorld * | DynamicsWorld () |
| |
| virtual FluidPlane * | FindFluidPlaneForDepth (float fltDepth) |
| | Searches the fluid planes starting at the lowest height and working its way up to find the first one that depth is under. This is the density we will use for hydrodynamics. More...
|
| |
| virtual void | GenerateCollisionMeshFile (std::string strOriginalMeshFile, std::string strCollisionMeshFile, float fltScaleX, float fltScaleY, float fltScaleZ) |
| | Generates a collision mesh file. More...
|
| |
|
virtual void | GetPositionAndRotationFromD3DMatrix (float(&aryTransform)[4][4], CStdFPoint &vPos, CStdFPoint &vRot) |
| |
|
virtual void | Gravity (float fltVal, bool bUseScaling=true) |
| |
|
virtual bool | HasFluidPlane (FluidPlane *lpPlane) |
| |
|
virtual void | Initialize (int argc, const char **argv) |
| |
|
virtual void | LinearCompliance (float fltVal, bool bUseScaling=true) |
| |
|
virtual void | LinearDamping (float fltVal, bool bUseScaling=true) |
| |
|
virtual void | LinearKineticLoss (float fltVal, bool bUseScaling=true) |
| |
|
virtual void | RemoveFluidPlane (FluidPlane *lpPlane) |
| |
|
virtual void | Reset () |
| |
|
virtual void | ResetSimulation () |
| |
|
btConstraintSolver * | Solver () |
| |
|
virtual void | SortFluidPlanes () |
| |
|
virtual void | StabilityScale (float fltVal) |
| |
Definition at line 15 of file BlSimulator.h.
| void BulletAnimatSim::BlSimulator::GenerateCollisionMeshFile |
( |
std::string |
strOriginalMeshFile, |
|
|
std::string |
strCollisionMeshFile, |
|
|
float |
fltScaleX, |
|
|
float |
fltScaleY, |
|
|
float |
fltScaleZ |
|
) |
| |
|
virtual |
Generates a collision mesh file.
When we want to use a collision mesh then we need to create a new .osg file using the mesh created by the physics engine instead of the graphics one. The UI will call this method when the user sets a new mesh file or type so we can create the new file. It will load the graphics file, convert it usign the physics engine, and then save it back out. When loading the convex mesh we will use this new file instead of the original one.
- Author
- dcofer
- Date
- 6/10/2011
- Parameters
-
| strOriginalMeshFile | The original mesh file. |
| strCollisionMeshFile | The new collision mesh file. |
Definition at line 370 of file BlSimulator.cpp.
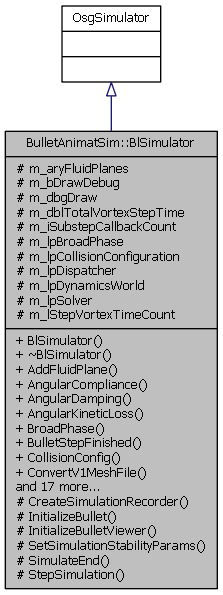
 Inheritance diagram for BulletAnimatSim::BlSimulator:
Inheritance diagram for BulletAnimatSim::BlSimulator: 1.8.10
1.8.10