|
AnimatLab
2
Test
|
|
AnimatLab
2
Test
|
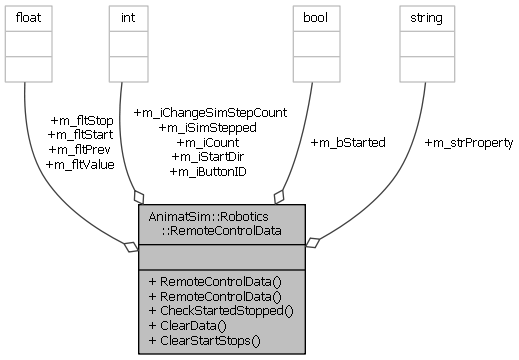
 Collaboration diagram for AnimatSim::Robotics::RemoteControlData:
Collaboration diagram for AnimatSim::Robotics::RemoteControlData:Public Member Functions | |
| RemoteControlData (std::string strName, int iButtonID, int iChangeSimStepCount) | |
| void | CheckStartedStopped () |
| void | ClearData () |
| void | ClearStartStops () |
Public Attributes | |
| bool | m_bStarted |
| float | m_fltPrev |
| float | m_fltStart |
| float | m_fltStop |
| float | m_fltValue |
| int | m_iButtonID |
| int | m_iChangeSimStepCount |
| The number of simulation time slices to keep a start/stop signal active. | |
| int | m_iCount |
| int | m_iSimStepped |
| int | m_iStartDir |
| std::string | m_strProperty |
| The array index of this button. | |
Definition at line 9 of file RemoteControlLinkage.h.
| int AnimatSim::Robotics::RemoteControlData::m_iSimStepped |
This keeps track of whether the sim has already stepped over a change or not. The first time start or stop is set and sim is called we do not want to reset it to zero right then so that the rest of the app can see it. We do want to reset it the next time though.
Definition at line 26 of file RemoteControlLinkage.h.
 1.8.10
1.8.10