|
AnimatLab
2
Test
|
|
AnimatLab
2
Test
|
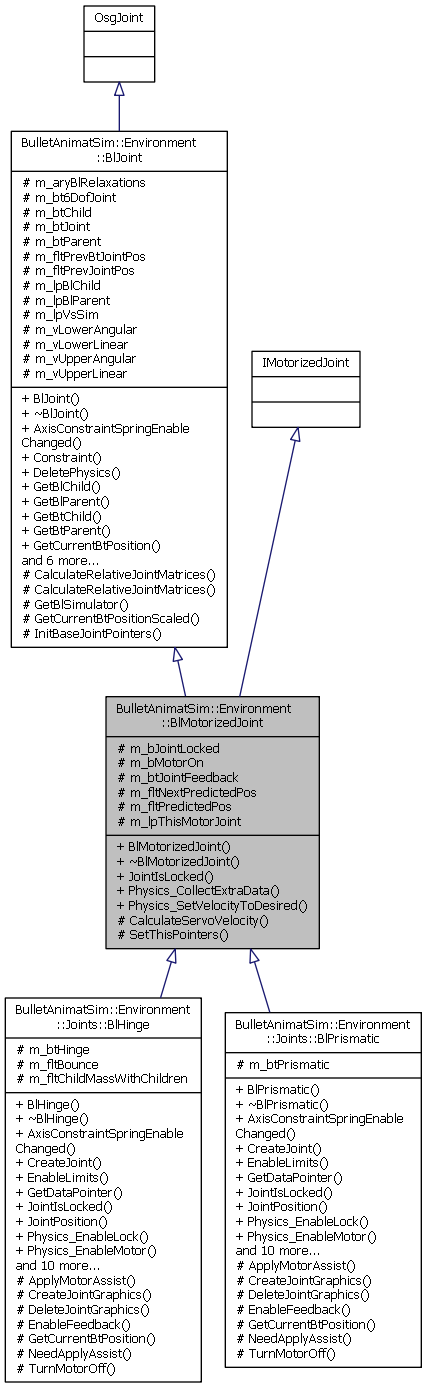
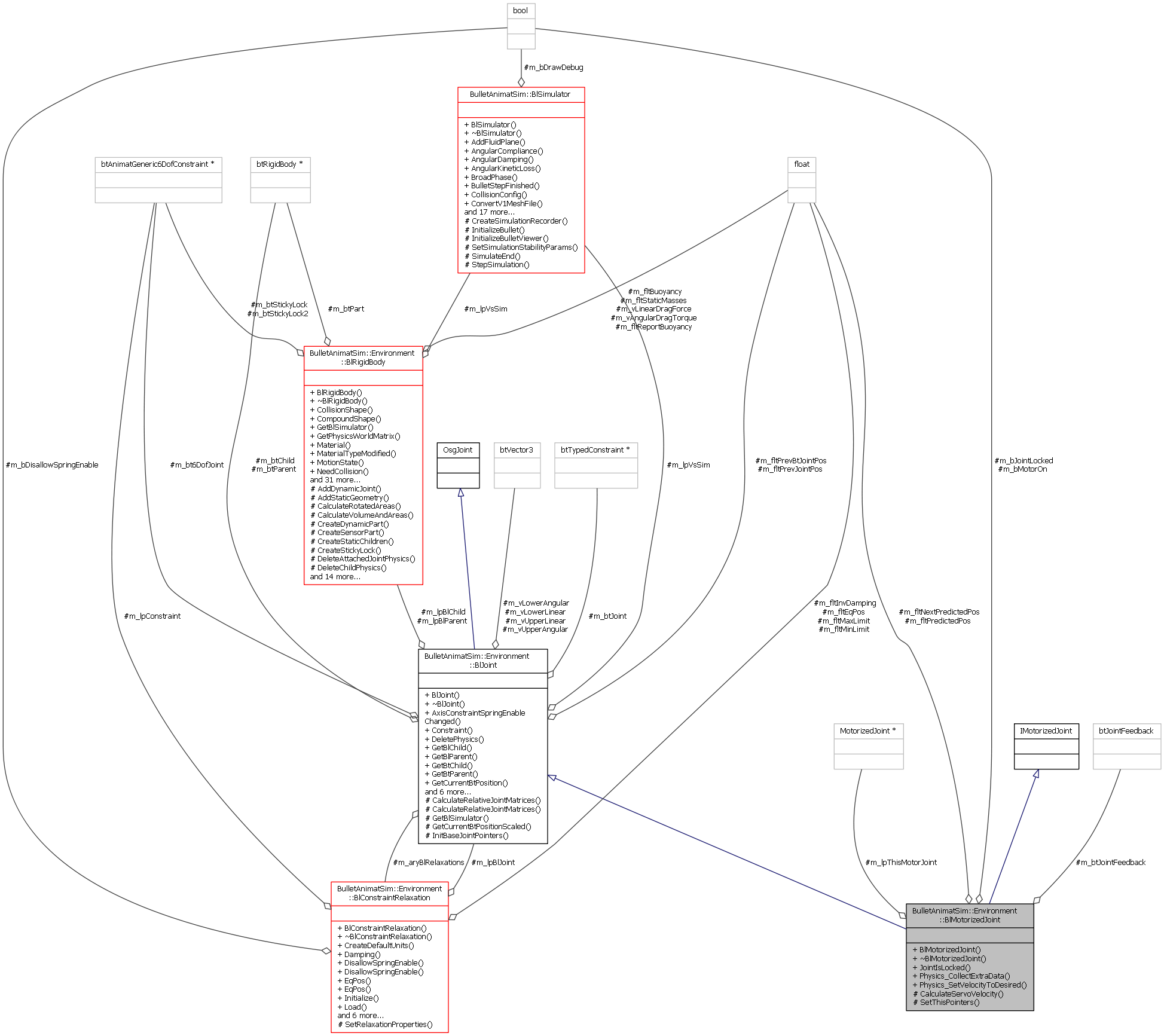
 Inheritance diagram for BulletAnimatSim::Environment::BlMotorizedJoint: Collaboration diagram for BulletAnimatSim::Environment::BlMotorizedJoint:
Inheritance diagram for BulletAnimatSim::Environment::BlMotorizedJoint: Collaboration diagram for BulletAnimatSim::Environment::BlMotorizedJoint:Public Member Functions | |
| virtual bool | JointIsLocked ()=0 |
| virtual void | Physics_CollectExtraData () |
| virtual void | Physics_SetVelocityToDesired () |
| Public Member Functions inherited from BulletAnimatSim::Environment::BlJoint | |
| virtual void | AxisConstraintSpringEnableChanged (bool bEnabled) |
| virtual btTypedConstraint * | Constraint () |
| virtual void | DeletePhysics (bool bIncludeChildren) |
| virtual BlRigidBody * | GetBlChild () |
| virtual BlRigidBody * | GetBlParent () |
| virtual btRigidBody * | GetBtChild () |
| virtual btRigidBody * | GetBtParent () |
| virtual float | GetCurrentBtPosition () |
| virtual void | GetLimitsFromRelaxations (btVector3 &vLowerLinear, btVector3 &UpperLinear, btVector3 &vLowerAngular, btVector3 &vUpperAngular) |
| virtual void | Physics_CollectData () |
| virtual bool | Physics_IsDefined () |
| virtual void | Physics_ResetSimulation () |
| virtual void | SetConstraintFriction () |
| virtual void | SetLimitValues () |
Protected Member Functions | |
| virtual void | CalculateServoVelocity () |
| virtual void | SetThisPointers () |
| Protected Member Functions inherited from BulletAnimatSim::Environment::BlJoint | |
| virtual void | CalculateRelativeJointMatrices (btTransform &mtJointRelToParent, btTransform &mtJointRelToChild) |
| virtual void | CalculateRelativeJointMatrices (CStdFPoint vAdditionalRot, btTransform &mtJointRelToParent, btTransform &mtJointRelToChild) |
| virtual BlSimulator * | GetBlSimulator () |
| virtual float | GetCurrentBtPositionScaled () |
| virtual void | InitBaseJointPointers (RigidBody *lpParent, RigidBody *lpChild, ConstraintRelaxation **aryRelaxations, int iDisallowSpringIndex) |
Protected Attributes | |
| bool | m_bJointLocked |
| bool | m_bMotorOn |
| btJointFeedback | m_btJointFeedback |
| float | m_fltNextPredictedPos |
| float | m_fltPredictedPos |
| MotorizedJoint * | m_lpThisMotorJoint |
| Protected Attributes inherited from BulletAnimatSim::Environment::BlJoint | |
| BlConstraintRelaxation * | m_aryBlRelaxations [6] |
| The bullet relaxation for the primary displacement relaxation. | |
| btAnimatGeneric6DofConstraint * | m_bt6DofJoint |
| btRigidBody * | m_btChild |
| btTypedConstraint * | m_btJoint |
| btRigidBody * | m_btParent |
| float | m_fltPrevBtJointPos |
| float | m_fltPrevJointPos |
| BlRigidBody * | m_lpBlChild |
| BlRigidBody * | m_lpBlParent |
| BlSimulator * | m_lpVsSim |
| btVector3 | m_vLowerAngular |
| btVector3 | m_vLowerLinear |
| btVector3 | m_vUpperAngular |
| btVector3 | m_vUpperLinear |
Definition at line 9 of file BlMotorizedJoint.h.
 1.8.10
1.8.10