|
AnimatLab
2
Test
|
|
AnimatLab
2
Test
|
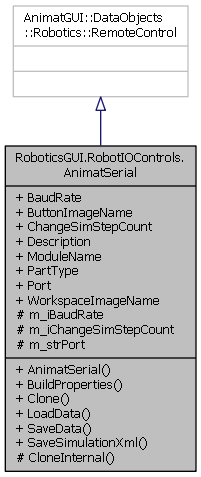
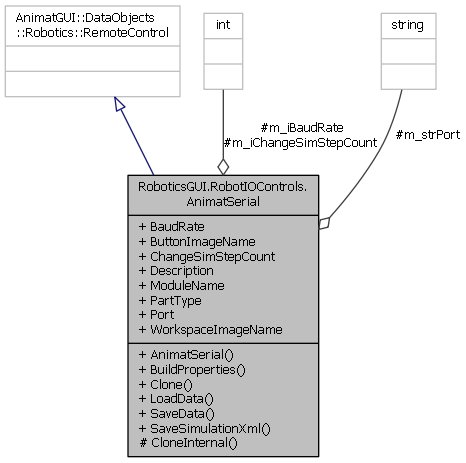
 Inheritance diagram for RoboticsGUI.RobotIOControls.AnimatSerial: Collaboration diagram for RoboticsGUI.RobotIOControls.AnimatSerial:
Inheritance diagram for RoboticsGUI.RobotIOControls.AnimatSerial: Collaboration diagram for RoboticsGUI.RobotIOControls.AnimatSerial:Public Member Functions | |
| AnimatSerial (AnimatGUI.Framework.DataObject doParent) | |
| override void | BuildProperties (ref AnimatGuiCtrls.Controls.PropertyTable propTable) |
| override AnimatGUI.Framework.DataObject | Clone (AnimatGUI.Framework.DataObject doParent, bool bCutData, AnimatGUI.Framework.DataObject doRoot) |
| override void | LoadData (ManagedAnimatInterfaces.IStdXml oXml) |
| override void | SaveData (ManagedAnimatInterfaces.IStdXml oXml) |
| override void | SaveSimulationXml (ManagedAnimatInterfaces.IStdXml oXml, ref DataObject nmParentControl, string strName="") |
Protected Member Functions | |
| override void | CloneInternal (DataObject doOriginal, bool bCutData, DataObject doRoot) |
Protected Attributes | |
| int | m_iBaudRate = 38400 |
| int | m_iChangeSimStepCount = 5 |
| The number of time slices to keep a start/stop signal active. More... | |
| string | m_strPort = "" |
Definition at line 12 of file AnimatSerial.cs.
|
protected |
The number of time slices to keep a start/stop signal active.
Definition at line 22 of file AnimatSerial.cs.
 1.8.10
1.8.10