|
|
override void | CloneInternal (AnimatGUI.Framework.DataObject doOriginal, bool bCutData, AnimatGUI.Framework.DataObject doRoot) |
| |
|
override System.Type | GetLinkedPartDropDownTreeType () |
| |
|
override void | CloneInternal (AnimatGUI.Framework.DataObject doOriginal, bool bCutData, AnimatGUI.Framework.DataObject doRoot) |
| |
|
override System.Type | GetLinkedPartDropDownTreeType () |
| |
|
|
int | m_iUpdateAllParamsCount = 10 |
| |
|
int | m_iUpdateQueueIndex = -1 |
| |
|
bool | m_bQueryMotorData = true |
| |
| bool | m_bResetToStartPos = false |
| | If true then when the simulation starts it will always reset the position of the servo to 0 to begin with. More...
|
| |
|
float | m_fltMaxAngle = 150 |
| |
|
float | m_fltMinAngle = -150 |
| |
|
float | m_fltRPMPerFPUnit = 0.111f |
| |
|
int | m_iCCWComplianceMargin = 1 |
| |
|
int | m_iCCWComplianceSlope = 32 |
| |
|
int | m_iCWComplianceMargin = 1 |
| |
|
int | m_iCWComplianceSlope = 32 |
| |
|
int | m_iMaxLoadFP = 1023 |
| |
|
int | m_iMaxPosFP = 1023 |
| |
|
int | m_iMaxTorque = 1023 |
| |
|
int | m_iMaxVelocityFP = 1023 |
| |
|
int | m_iMinLoadFP = 0 |
| |
|
int | m_iMinPosFP = 0 |
| |
|
int | m_iMinVelocityFP = 1 |
| |
|
AnimatGUI.Framework.ScaledNumber | m_snTranslationRange |
| |
|
|
override string | ModuleName [get] |
| |
|
virtual int | UpdateAllParamsCount [get, set] |
| |
|
virtual int | UpdateQueueIndex [get, set] |
| |
|
virtual int | CCWComplianceMargin [get, set] |
| |
|
virtual int | CCWComplianceSlope [get, set] |
| |
|
virtual int | CWComplianceMargin [get, set] |
| |
|
virtual int | CWComplianceSlope [get, set] |
| |
|
virtual bool | IsHinge [get] |
| |
|
virtual float | MaxAngle [get, set] |
| |
|
virtual int | MaxLoadFP [get, set] |
| |
|
virtual int | MaxPosFP [get, set] |
| |
|
virtual int | MaxTorque [get, set] |
| |
|
virtual int | MaxVelocityFP [get, set] |
| |
|
virtual float | MinAngle [get, set] |
| |
|
virtual int | MinLoadFP [get, set] |
| |
|
virtual int | MinPosFP [get, set] |
| |
|
virtual int | MinVelocityFP [get, set] |
| |
|
override string | ModuleName [get] |
| |
|
virtual bool | QueryMotorData [get, set] |
| |
|
virtual bool | ResetToStartPos [get, set] |
| |
|
virtual float | RPMPerFPUnit [get, set] |
| |
|
virtual AnimatGUI.Framework.ScaledNumber | TranslationRange [get, set] |
| |
Definition at line 13 of file DynamixelUSBServo.cs.
The documentation for this class was generated from the following file:
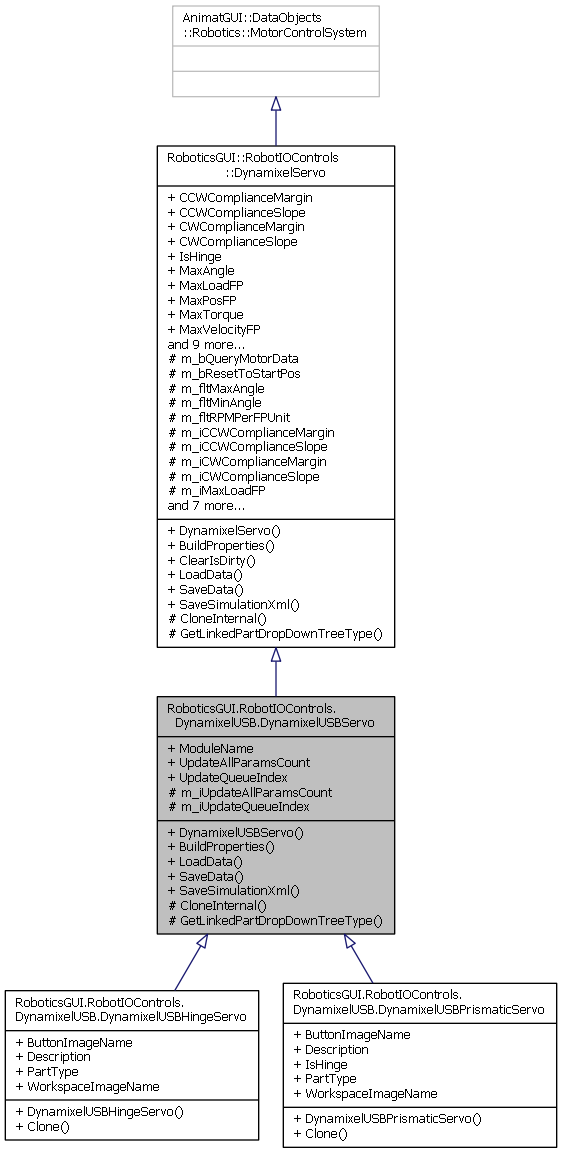
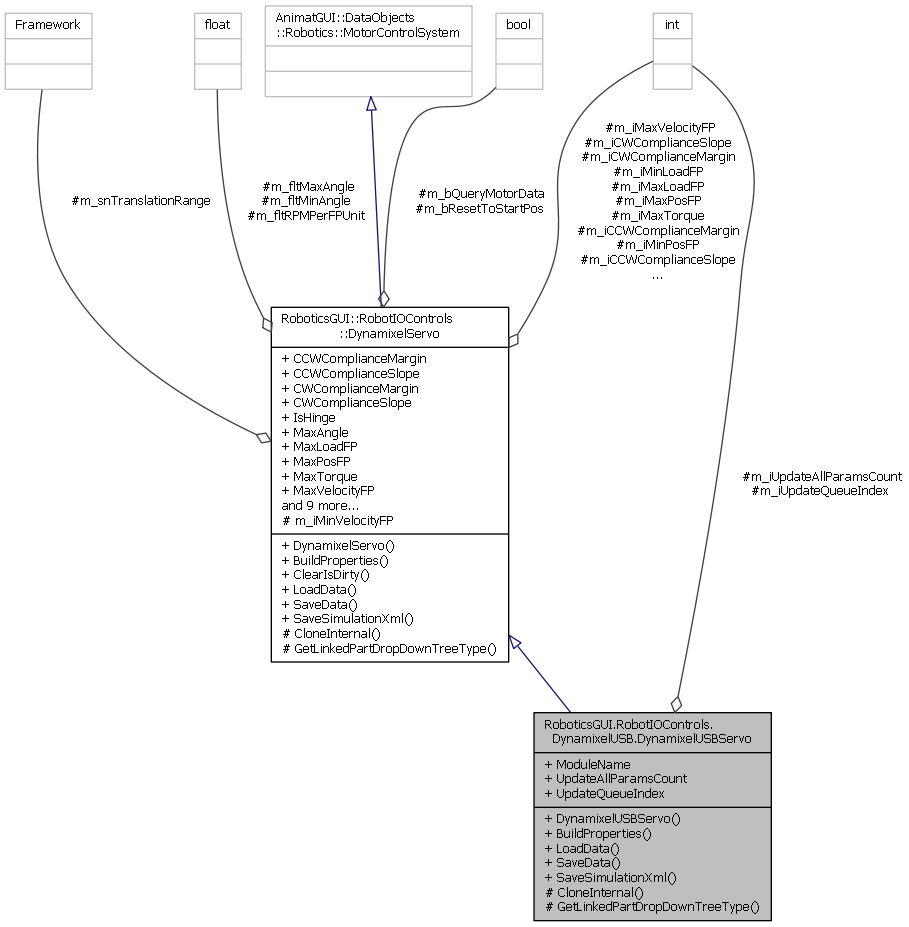
 Inheritance diagram for RoboticsGUI.RobotIOControls.DynamixelUSB.DynamixelUSBServo:
Inheritance diagram for RoboticsGUI.RobotIOControls.DynamixelUSB.DynamixelUSBServo: 1.8.10
1.8.10