|
AnimatLab
2
Test
|
|
AnimatLab
2
Test
|
Base class for all body parts and joints. More...
#include <BodyPart.h>
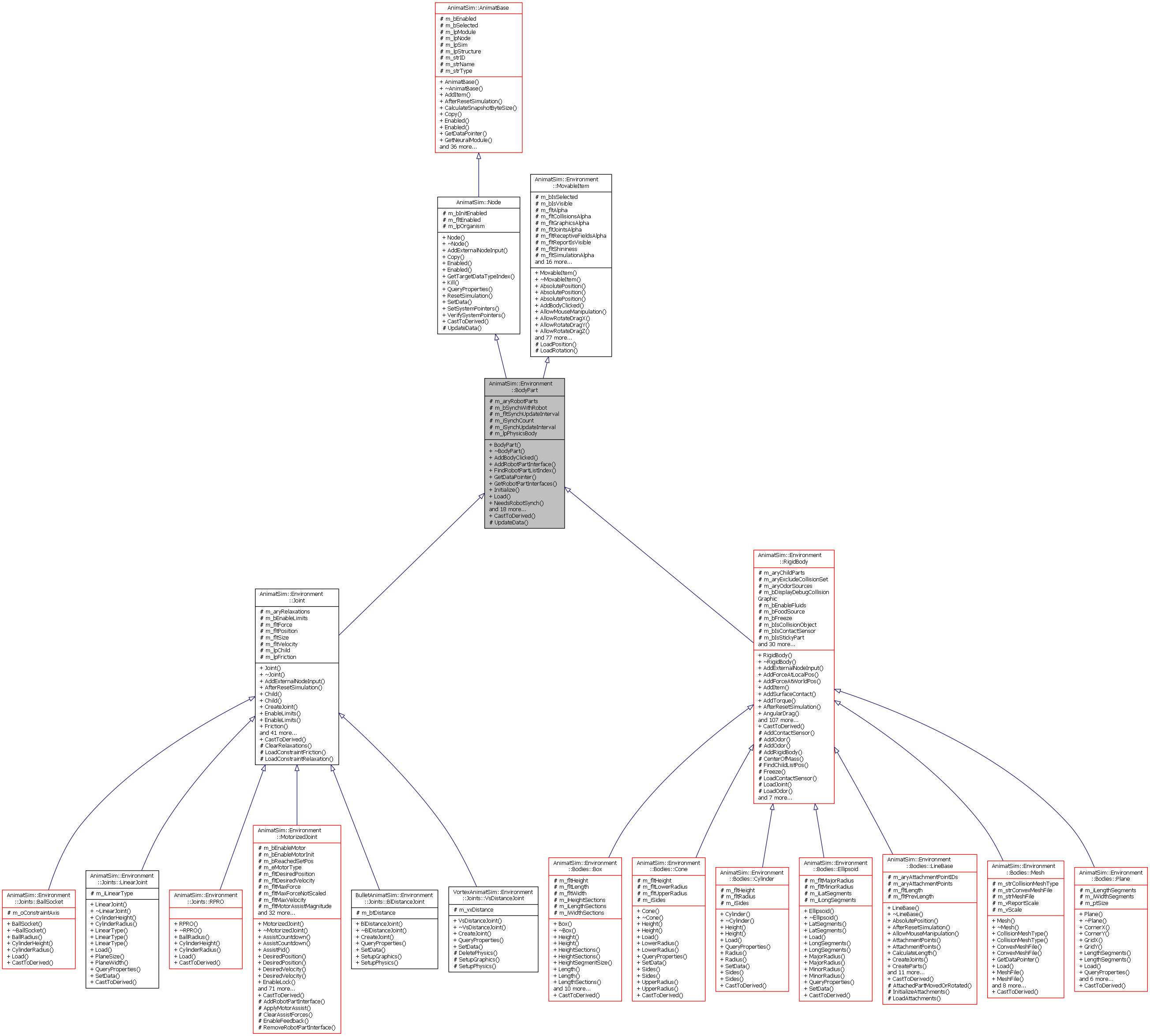
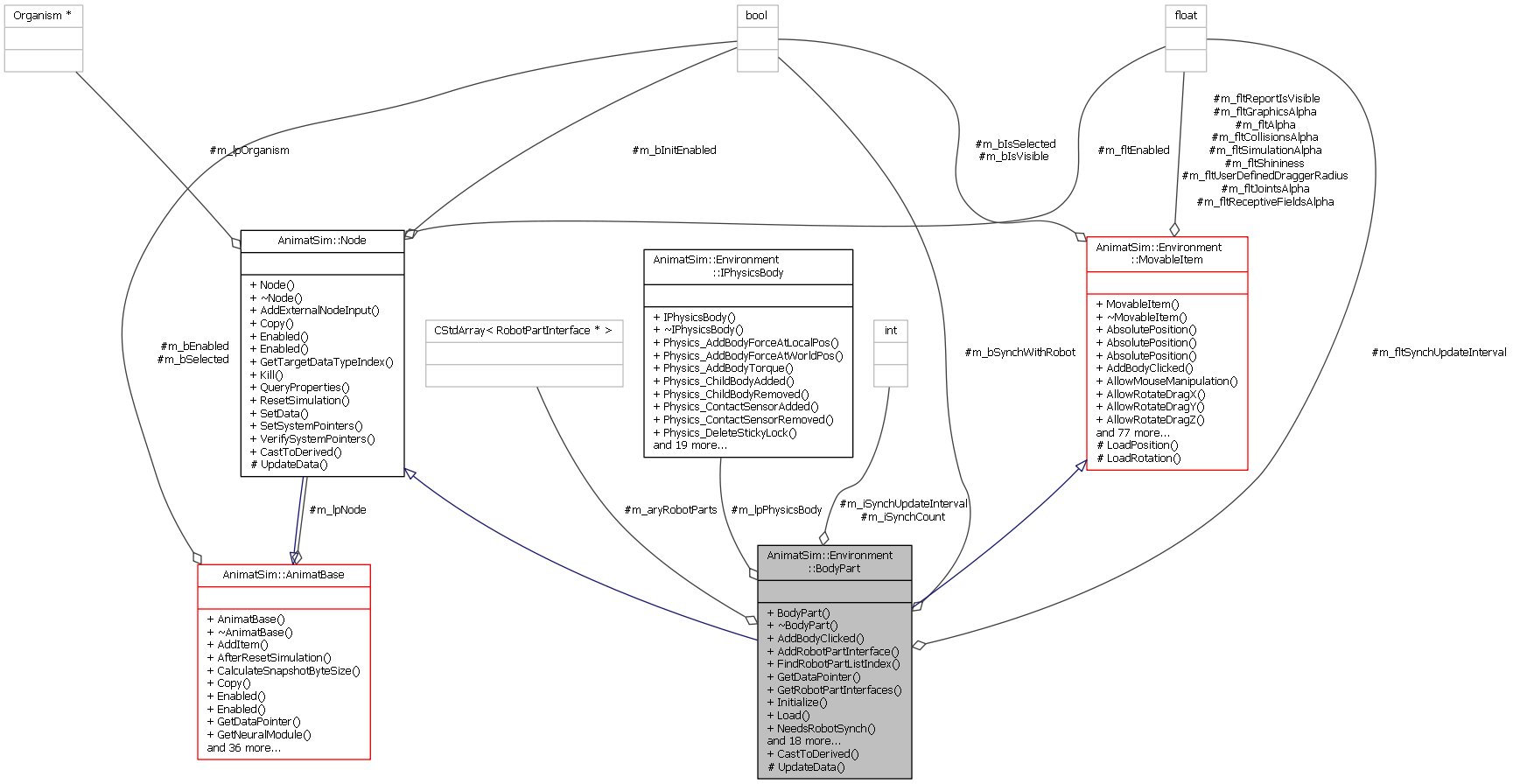
 Inheritance diagram for AnimatSim::Environment::BodyPart: Collaboration diagram for AnimatSim::Environment::BodyPart:
Inheritance diagram for AnimatSim::Environment::BodyPart: Collaboration diagram for AnimatSim::Environment::BodyPart:Public Member Functions | |
| BodyPart (void) | |
| Default constructor. More... | |
| virtual | ~BodyPart (void) |
| Destructor. More... | |
| virtual void | AddBodyClicked (float fltPosX, float fltPosY, float fltPosZ, float fltNormX, float fltNormY, float fltNormZ) |
| Called when the user clicks on this object while the AddBody mode is active. More... | |
| virtual void | AddRobotPartInterface (RobotPartInterface *lpPart) |
| virtual int | FindRobotPartListIndex (std::string strID, bool bThrowError=true) |
| Finds the index of a robot part attached to this body part with the matching ID. More... | |
| virtual float * | GetDataPointer (const std::string &strDataType) |
| virtual CStdArray< RobotPartInterface * > * | GetRobotPartInterfaces () |
| Gets a pointer to the roboto part interface associated with this body part. More... | |
| virtual void | Initialize () |
| Initializes this object. More... | |
| virtual void | Load (CStdXml &oXml) |
| virtual bool | NeedsRobotSynch () |
| virtual IPhysicsBody * | PhysicsBody () |
| Gets the physics body interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each box, sphere, etc.. More... | |
| virtual void | PhysicsBody (IPhysicsBody *lpBody) |
| Sets the physics body interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each box, sphere, etc.. More... | |
| virtual void | QueryProperties (CStdPtrArray< TypeProperty > &aryProperties) |
| virtual void | RemoveRobotPartInterface (RobotPartInterface *lpPart) |
| virtual void | ResetSimulation () |
| Resets the simulation back to time 0. More... | |
| virtual void | Resize () |
| Called when this object has been resized. More... | |
| virtual void | Selected (bool bValue, bool bSelectMultiple) |
| virtual bool | SetData (const std::string &strDataType, const std::string &strValue, bool bThrowError=true) |
| virtual void | SetSystemPointers (Simulator *lpSim, Structure *lpStructure, NeuralModule *lpModule, Node *lpNode, bool bVerify) |
| virtual float | SynchUpdateInterval () |
| This is how often we need to update this particular adapter. More... | |
| virtual void | SynchUpdateInterval (float fltVal) |
| Determines how often we need to update this particular adapter. More... | |
| virtual bool | SynchWithRobot () |
| Gets whether the m_bRobotAdpaterSynch flag applies to this adapter. More... | |
| virtual void | SynchWithRobot (bool bVal) |
| Determines whether the m_bRobotAdpaterSynch flag applies to this adapter. More... | |
| virtual void | TimeStepModified () |
| If the time step is modified then we need to recalculate the length of the delay buffer. More... | |
| virtual void | UpdateExtraData () |
| UpdateData is called during this body parts sim update call, and before any of its child updates because those children may need import information like this parts position. However, there are a number of pieces of information that are not critical to the part itself, but that a user may have asked for. I do not want to collect that info for every part if it is not needed. So instead, if a user asks for it then this part is added to a list on the simulation. After all parts have been updated for a simulation step then we loop through the list of just the necessary parts and call UpdateExtraData to collect this additional data. It is important that this be done after all parts have stepped becasue some of this data will only be correct at the end. An example of this is force applied to a part. Forces can be added by any child parts, so it is only at the end that these values are valid. More... | |
| virtual void | UpdatePhysicsPosFromGraphics () |
| Updates the physics position from graphics. More... | |
| virtual void | VisualSelectionModeChanged (int iNewMode) |
| Called when the visual selection mode changed in GUI. More... | |
| virtual void | WakeDynamics () |
| Public Member Functions inherited from AnimatSim::Node | |
| Node () | |
| Default constructor. More... | |
| virtual | ~Node () |
| Destructor. More... | |
| virtual void | AddExternalNodeInput (int iTargetDataType, float fltInput)=0 |
| Adds an external node input. More... | |
| virtual void | Copy (CStdSerialize *lpSource) |
| virtual bool | Enabled () |
| Tells whether this node is enabled. More... | |
| virtual void | Enabled (bool bValue) |
| Enables the node. More... | |
| virtual int | GetTargetDataTypeIndex (const std::string &strDataType) |
| Used to convert a string target data type into an integer index. More... | |
| virtual void | Kill (bool bState=true) |
| Kills. More... | |
| virtual void | SetSystemPointers (Simulator *lpSim, Structure *lpStructure, NeuralModule *lpModule, Node *lpNode, bool bVerify) |
| Sets the system pointers. More... | |
| virtual void | VerifySystemPointers () |
| Verify that system pointers have been set correctly. More... | |
| Public Member Functions inherited from AnimatSim::AnimatBase | |
| AnimatBase () | |
| Constructs an AnimatBase object. More... | |
| virtual | ~AnimatBase () |
| Destroys the AnimatBase object.. More... | |
| virtual bool | AddItem (const std::string &strItemType, const std::string &strXml, bool bThrowError=true, bool bDoNotInit=false) |
| Adds a new object to this parent. More... | |
| virtual void | AfterResetSimulation () |
| Called after a simulation reset for some objects. More... | |
| virtual long | CalculateSnapshotByteSize () |
| Calculates the snapshot byte size. More... | |
| virtual NeuralModule * | GetNeuralModule () |
| Gets the neural module. More... | |
| virtual Node * | GetNode () |
| Gets the node. More... | |
| virtual Simulator * | GetSimulator () |
| Gets the simulator pointer. More... | |
| virtual Structure * | GetStructure () |
| Gets the structure for this node. More... | |
| virtual bool | HasProperty (const std::string &strName) |
| Queries this object if it has a property with the given name. More... | |
| virtual std::string | ID () |
| Gets the unique GUID ID of this object. More... | |
| virtual void | ID (std::string strValue) |
| Sets the unique GUID ID of the object. More... | |
| virtual void | Load (StdUtils::CStdXml &oXml) |
| Loads the item using an XML data packet. More... | |
| virtual void | LoadKeyFrameSnapshot (byte *aryBytes, long &lIndex) |
| Loads a key frame snapshot. More... | |
| virtual std::string | Name () |
| Gets the name of this object. More... | |
| virtual void | Name (std::string strValue) |
| Sets the name of the object. Blank is acceptable. More... | |
| virtual AnimatPropertyType | PropertyType (const std::string &strName) |
| virtual void | ReInitialize () |
| Re-initialize this object. More... | |
| virtual bool | RemoveItem (const std::string &strItemType, const std::string &strID, bool bThrowError=true) |
| Removes a child item from this parent. More... | |
| virtual void | Reset () |
| Resets this object. More... | |
| virtual void | RigidBodyAdded (std::string strID) |
| virtual void | RigidBodyRemoved (std::string strID) |
| virtual void | SaveKeyFrameSnapshot (byte *aryBytes, long &lIndex) |
| Saves a key frame snapshot. More... | |
| virtual bool | Selected () |
| Tells if this items is selected or not. More... | |
| virtual bool | SetData (const std::string &strDataType, const float fltValue, bool bThrowError=true) |
| Set a variable based on a string data type name. More... | |
| virtual bool | SetData (const std::string &strDataType, const long lValue, bool bThrowError=true) |
| Set a variable based on a string data type name. More... | |
| virtual void | SimPausing () |
| Called just before the simulation pauses. More... | |
| virtual void | SimStarting () |
| Called just before the simulation starts. More... | |
| virtual void | SimStopping () |
| Called just before the simulation stops. More... | |
| virtual void | StepSimulation () |
| Step the simulation for this object. More... | |
| virtual std::string | Type () |
| returns the string type name of this object. More... | |
| virtual void | Type (std::string strValue) |
| Sets the class type for this object. More... | |
| Public Member Functions inherited from AnimatSim::Environment::MovableItem | |
| MovableItem (void) | |
| Default constructor. More... | |
| virtual | ~MovableItem (void) |
| Destructor. More... | |
| virtual CStdFPoint | AbsolutePosition () |
| Gets the absolute position of this body part. More... | |
| virtual void | AbsolutePosition (CStdFPoint &oPoint) |
| Sets the absolute position of this body part. (m_oAbsPosition) More... | |
| virtual void | AbsolutePosition (float fltX, float fltY, float fltZ) |
| Sets the absolute position of this body part. (m_oAbsPosition) More... | |
| virtual bool | AllowMouseManipulation () |
| Tells if a given part can be manipulated using the mouse and draggers. More... | |
| virtual bool | AllowRotateDragX () |
| Gets whether this body part can be rotated along the x-axis by the user with the drag handlers. More... | |
| virtual bool | AllowRotateDragY () |
| Gets whether this body part can be rotated along the y-axis by the user with the drag handlers. More... | |
| virtual bool | AllowRotateDragZ () |
| Gets whether this body part can be rotated along the z-axis by the user with the drag handlers. More... | |
| virtual bool | AllowTranslateDragX () |
| Gets whether this body part can be translated along the x-axis by the user with the drag handlers. More... | |
| virtual bool | AllowTranslateDragY () |
| Gets whether this body part can be translated along the y-axis by the user with the drag handlers. More... | |
| virtual bool | AllowTranslateDragZ () |
| Gets whether this body part can be translated along the z-axis by the user with the drag handlers. More... | |
| virtual float | Alpha () |
| Gets the current alpha. More... | |
| virtual void | Alpha (float fltAlpha) |
| Sets the current alpha. More... | |
| virtual CStdColor * | Ambient () |
| Gets the ambient color value. More... | |
| virtual void | Ambient (CStdColor &aryColor) |
| virtual void | Ambient (float *aryColor) |
| Sets the Ambient color. More... | |
| virtual void | Ambient (std::string strXml) |
| Loads the Ambient color from an XML data packet. More... | |
| virtual bool | CalculateLocalPosForWorldPos (float fltWorldX, float fltWorldY, float fltWorldZ, CStdFPoint &vLocalPos) |
| Calculates the local position values for matrix transform for the part to be in a specific world position. More... | |
| virtual IMovableItemCallback * | Callback () |
| Gets the callback interface pointer. This is an interface pointer to a callback class that allows us to notify the GUI of events that occur within the simulation. More... | |
| virtual void | Callback (IMovableItemCallback *lpCallback) |
| Sets the callback interface pointer. This is an interface pointer to a callback class that allows us to notify the GUI of events that occur within the simulation. More... | |
| virtual float | CollisionsAlpha () |
| Gets the collisions alpha. More... | |
| virtual void | CollisionsAlpha (float fltVal) |
| Sets the collisions alpha. More... | |
| virtual CStdColor * | Diffuse () |
| Gets the diffuse color. More... | |
| virtual void | Diffuse (CStdColor &aryColor) |
| virtual void | Diffuse (float *aryColor) |
| Sets the Diffuse color. More... | |
| virtual void | Diffuse (std::string strXml) |
| Loads the Diffuse color from an XML data packet. More... | |
| virtual BoundingBox | GetBoundingBox () |
| Gets the bounding box for this part. More... | |
| virtual float | GetBoundingRadius () |
| Gets the bounding radius of this part. More... | |
| virtual CStdFPoint | GetCurrentPosition () |
| Gets the current position of this part. More... | |
| virtual float | GraphicsAlpha () |
| Gets the graphics alpha. More... | |
| virtual void | GraphicsAlpha (float fltVal) |
| Sets the graphics alpha. More... | |
| virtual bool | IsSelected () |
| Query if this object is selected. More... | |
| virtual bool | IsVisible () |
| Query if this object is visible. More... | |
| virtual void | IsVisible (bool bVal) |
| Sets whether this part is visible or not. More... | |
| virtual float | JointsAlpha () |
| Gets the joints alpha. More... | |
| virtual void | JointsAlpha (float fltVal) |
| Sets the joints alpha. More... | |
| virtual std::string | LocalTransformationMatrixString () |
| Returns a string representation of the transformation matrix of this object. This is primarily used to save off the transform matrix into the project file. More... | |
| virtual void | OrientNewPart (float fltXPos, float fltYPos, float fltZPos, float fltXNorm, float fltYNorm, float fltZNorm) |
| Orients a new part based on where the parent was clicked and the normal of the surface face. More... | |
| RigidBody * | Parent () |
| Gets the parent RigidBody of this part. More... | |
| void | Parent (RigidBody *lpValue) |
| Sets the parent RigidBody of this part. More... | |
| virtual IPhysicsMovableItem * | PhysicsMovableItem () |
| Gets the physics body interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each box, sphere, etc.. More... | |
| virtual void | PhysicsMovableItem (IPhysicsMovableItem *lpBase) |
| Sets the physics body interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each box, sphere, etc.. More... | |
| virtual CStdFPoint | Position () |
| Gets the local position. (m_oPosition) More... | |
| virtual void | Position (CStdFPoint &oPoint, bool bUseScaling=true, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the local position. (m_oPosition) More... | |
| virtual void | Position (float fltX, float fltY, float fltZ, bool bUseScaling=true, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the local position. (m_oPosition) More... | |
| virtual void | Position (std::string strXml, bool bUseScaling=true, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the local position. (m_oPosition). This method is primarily used by the GUI to reset the local position using an xml data packet. More... | |
| virtual float | ReceptiveFieldsAlpha () |
| Gets the receptive fields alpha. More... | |
| virtual void | ReceptiveFieldsAlpha (float fltVal) |
| Sets the receptive fields alpha. More... | |
| virtual CStdFPoint | ReportPosition () |
| Gets the reported local position. (m_oReportPosition). More... | |
| virtual void | ReportPosition (CStdFPoint &oPoint) |
| Sets the reported local position. (m_oReportPosition). More... | |
| virtual void | ReportPosition (float fltX, float fltY, float fltZ) |
| Sets the reported local position. (m_oReportPosition). More... | |
| virtual CStdFPoint | ReportRotation () |
| Gets the reported rotation of this part. (m_oReportRotation) More... | |
| virtual void | ReportRotation (CStdFPoint &oPoint) |
| Sets the reported rotation of this part. (m_oReportRotation) More... | |
| virtual void | ReportRotation (float fltX, float fltY, float fltZ) |
| Sets the reported rotation of this part. (m_oReportRotation) More... | |
| virtual CStdFPoint | ReportWorldPosition () |
| Gets the reported world position. (m_oReportWorldPosition) More... | |
| virtual void | ReportWorldPosition (CStdFPoint &oPoint) |
| Sets the reported world position (m_oReportWorldPosition) More... | |
| virtual void | ReportWorldPosition (float fltX, float fltY, float fltZ) |
| Sets the reported world position (m_oReportWorldPosition) More... | |
| virtual CStdFPoint | Rotation () |
| Gets the rotation of this body in radians. More... | |
| virtual void | Rotation (CStdFPoint &oPoint, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the rotation of this body in radians. (m_oRotation) More... | |
| virtual void | Rotation (float fltX, float fltY, float fltZ, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the rotation of this body in radians. (m_oRotation) More... | |
| virtual void | Rotation (std::string strXml, bool bFireChangeEvent=false, bool bUpdateMatrix=true) |
| Sets the rotation of this body in radians. (m_oRotation). This method is primarily used by the GUI to reset the rotation using an xml data packet. More... | |
| virtual CStdFPoint | SelectedVertex () |
| Gets the relative position of the selected vertex. (m_vSelectedVertex) More... | |
| virtual void | SelectedVertex (CStdFPoint &vPoint, bool bFireChangeEvent=false, bool bUpdatePhysics=true) |
| Sets the relative position of the selected vertex. (m_vSelectedVertex) More... | |
| virtual void | SelectedVertex (float fltX, float fltY, float fltZ, bool bFireChangeEvent=false, bool bUpdatePhysics=true) |
| Sets the relative position of the selected vertex. (m_vSelectedVertex) More... | |
| virtual void | SetBoundingBox (int iIdx, float fltVal) |
| Sets one dimension of the bounding box. This does nothing for all parts except a mesh. More... | |
| virtual float | Shininess () |
| Gets the shininess. More... | |
| virtual void | Shininess (float fltVal) |
| Sets the shininess value. More... | |
| virtual float | SimulationAlpha () |
| Gets the simulation alpha. More... | |
| virtual void | SimulationAlpha (float fltVal) |
| Sets the simulation alpha. More... | |
| virtual CStdColor * | Specular () |
| Gets the specular color. More... | |
| virtual void | Specular (CStdColor &aryColor) |
| virtual void | Specular (float *aryColor) |
| Sets the Specular color. More... | |
| virtual void | Specular (std::string strXml) |
| Loads the Specular color from an XML data packet. More... | |
| virtual std::string | Texture () |
| Gets the texture filename. More... | |
| virtual void | Texture (std::string strValue) |
| Sets the Texture filename. More... | |
| virtual CStdFPoint | UpdateAbsolutePosition () |
| virtual void | UserDefinedDraggerRadius (float fltRadius) |
| User defined dragger radius. More... | |
| virtual float | UserDefinedDraggerRadius () |
| Gets the user defined dragger radius. More... | |
| virtual int | VisualSelectionType () |
| Gets the visual selection type for this part. More... | |
Static Public Member Functions | |
| static BodyPart * | CastToDerived (AnimatBase *lpBase) |
| Static Public Member Functions inherited from AnimatSim::Node | |
| static Node * | CastToDerived (AnimatBase *lpBase) |
Protected Member Functions | |
| virtual void | UpdateData () |
| Called to collect any body data for this part. More... | |
| Protected Member Functions inherited from AnimatSim::Environment::MovableItem | |
| virtual void | LoadPosition (CStdXml &oXml) |
| Loads the items position. More... | |
| virtual void | LoadRotation (CStdXml &oXml) |
| Loads the items rotation. More... | |
Protected Attributes | |
| CStdArray< RobotPartInterface * > | m_aryRobotParts |
| Array of pointers to robot part interfaces connected to this body part. | |
| bool | m_bSynchWithRobot |
| float | m_fltSynchUpdateInterval |
| This is how often we need to update this particular adapter. | |
| int | m_iSynchCount |
| Keeps track of the last time we did a synch for the robot. | |
| int | m_iSynchUpdateInterval |
| The number of ticks between each call to update for this adapter till the next update time. | |
| IPhysicsBody * | m_lpPhysicsBody |
| Protected Attributes inherited from AnimatSim::Node | |
| bool | m_bInitEnabled |
| Keeps track of the enabled state at sim startup. | |
| float | m_fltEnabled |
| This is used for reporting the enabled state in a GetDataPointer call. | |
| Organism * | m_lpOrganism |
| The pointer to this node's organism. | |
| Protected Attributes inherited from AnimatSim::AnimatBase | |
| bool | m_bEnabled |
| Tells if this item is enabled or not. If it is not enabled then it is not run. | |
| bool | m_bSelected |
| Tells whether the object is selected or not. | |
| AnimatSim::Behavior::NeuralModule * | m_lpModule |
| The pointer to this items parentNeuralModule. If this is not relevant for this object then this is NULL. | |
| Node * | m_lpNode |
| The pointer to this items parent Node. If this is not relevant for this object then this is NULL. | |
| Simulator * | m_lpSim |
| The pointer to a Simulation. | |
| AnimatSim::Environment::Structure * | m_lpStructure |
| The pointer to this items parent Structure. If this is not relevant for this object then this is NULL. | |
| std::string | m_strID |
| The unique Id for this object. | |
| std::string | m_strName |
| The name for this object. | |
| std::string | m_strType |
| The type for this object. Examples are Box, Plane, Neuron, etc.. | |
| Protected Attributes inherited from AnimatSim::Environment::MovableItem | |
| bool | m_bIsSelected |
| Keeps track of whether this movable item has been selected or not. | |
| bool | m_bIsVisible |
| float | m_fltAlpha |
| The current alpha transparency for this body part. | |
| float | m_fltCollisionsAlpha |
| The alpha transparency used in the Collisions VisualSelectionMode. | |
| float | m_fltGraphicsAlpha |
| The alpha transparency used in the Graphics VisualSelectionMode. | |
| float | m_fltJointsAlpha |
| The alpha transparency used in the Joints VisualSelectionMode. | |
| float | m_fltReceptiveFieldsAlpha |
| The alpha transparency used in the Receptive Fields VisualSelectionMode. | |
| float | m_fltReportIsVisible |
| float | m_fltShininess |
| The shininess of the part. A value between 0 and 128. | |
| float | m_fltSimulationAlpha |
| The alpha transparency used in the Simulation VisualSelectionMode. | |
| float | m_fltUserDefinedDraggerRadius |
| User defined drag handle radius. If this is -1 then the user has not set the value and the default is used. | |
| IMovableItemCallback * | m_lpCallback |
| Simulator * | m_lpMovableSim |
| The pointer to a Simulation. | |
| RigidBody * | m_lpParent |
| IPhysicsMovableItem * | m_lpPhysicsMovableItem |
| CStdFPoint | m_oAbsPosition |
| CStdFPoint | m_oPosition |
| These are rotation and position coords relative to the parent if this is a body part. | |
| CStdFPoint | m_oReportPosition |
| This is used for reporting the position back to the GUI. It is the position scaled for distance units. | |
| CStdFPoint | m_oReportRotation |
| CStdFPoint | m_oReportWorldPosition |
| This is used for reporting the position back to the GUI. It is the world position scaled for distance units. | |
| CStdFPoint | m_oRotation |
| std::string | m_strTexture |
| An optional texture to apply to the rigid body. | |
| CStdColor | m_vAmbient |
| The ambient color to apply to this part. It is specified as red, green, blue, and alpha. | |
| CStdColor | m_vDiffuse |
| The diffuse color to apply to this part. It is specified as red, green, blue, and alpha. | |
| CStdFPoint | m_vSelectedVertex |
| The relative position of the selected vertex. | |
| CStdColor | m_vSpecular |
| The specular color to apply to this part. It is specified as red, green, blue, and alpha. | |
Base class for all body parts and joints.
This is the base class for all types of body parts, both rigidbody and joints.
Definition at line 25 of file BodyPart.h.
| AnimatSim::Environment::BodyPart::BodyPart | ( | void | ) |
Default constructor.
Definition at line 46 of file BodyPart.cpp.
References m_bSynchWithRobot, m_fltSynchUpdateInterval, m_iSynchCount, m_iSynchUpdateInterval, and m_lpPhysicsBody.
|
virtual |
Destructor.
Definition at line 61 of file BodyPart.cpp.
References m_aryRobotParts, and StdUtils::Std_TraceMsg().
Here is the call graph for this function:
|
virtual |
Called when the user clicks on this object while the AddBody mode is active.
When the user selects the AddBody mode in the GUI then the simulation detects when a part is clicked in the simulation window. (This occurs in the VsCameraManipulator class). It gets the position of the click in global coordinates, and the normal vector for the surface that was clicked. We then need to pass this info back up the GUI and let it know the click occurred. This method uses the IMovableItemCallback object to send this info back up to the GUI.
| fltPosX | The position x coordinate. |
| fltPosY | The position y coordinate. |
| fltPosZ | The position z coordinate. |
| fltNormX | The normal x coordinate. |
| fltNormY | The normal y coordinate. |
| fltNormZ | The normal z coordinate. |
Reimplemented from AnimatSim::Environment::MovableItem.
Definition at line 236 of file BodyPart.cpp.
References AnimatSim::IMovableItemCallback::AddBodyClicked(), and AnimatSim::Environment::MovableItem::m_lpCallback.
Here is the call graph for this function:
|
virtual |
Finds the index of a robot part attached to this body part with the matching ID.
| strID | Part ID to find. |
| bThrowError | If true and the part is not found it throws an exception. If false and not found it returns -1. |
Definition at line 344 of file BodyPart.cpp.
References AnimatSim::AnimatBase::ID(), and m_aryRobotParts.
Here is the call graph for this function:
|
virtual |
Gets a pointer to the roboto part interface associated with this body part.
Definition at line 304 of file BodyPart.cpp.
References m_aryRobotParts.
|
virtual |
Initializes this object.
After an object is loaded in it must be initialized before it can be used. This allows the object to retrieve any pointers or setup memory that it will need during execution. Each object is responsible for initializing any of its child objects, so you simply need to call this method on the containing class to init all child objects. It also calls VerifySystemPointers to make sure that the system pointers have been setup correctly.
Reimplemented from AnimatSim::AnimatBase.
Reimplemented in AnimatSim::Environment::MotorizedJoint, AnimatSim::Environment::Joint, AnimatSim::Environment::Bodies::Mouth, and AnimatSim::Environment::Bodies::Sensor.
Definition at line 400 of file BodyPart.cpp.
References AnimatSim::AnimatBase::Initialize(), m_fltSynchUpdateInterval, and SynchUpdateInterval().
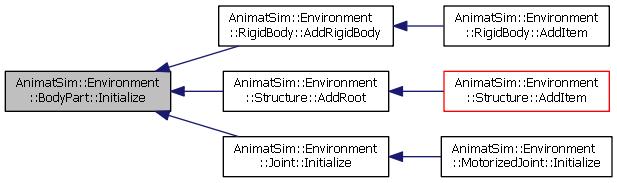
Referenced by AnimatSim::Environment::RigidBody::AddRigidBody(), AnimatSim::Environment::Structure::AddRoot(), and AnimatSim::Environment::Joint::Initialize().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Gets the physics body interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each box, sphere, etc..
Definition at line 115 of file BodyPart.cpp.
References m_lpPhysicsBody.
|
virtual |
Sets the physics body interface pointer. This is an interface reference to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each box, sphere, etc..
| [in,out] | lpBody | The pointer to the phsyics body interface. |
Definition at line 127 of file BodyPart.cpp.
References m_lpPhysicsBody.
|
virtual |
Resets the simulation back to time 0.
This method calls the ResetSimulation method on all subitems in order to reset the simulation back to the beginning.
Reimplemented from AnimatSim::Node.
Reimplemented in AnimatSim::Environment::RigidBody, AnimatSim::Environment::MotorizedJoint, AnimatSim::Environment::Bodies::LinearHillMuscle, AnimatSim::Environment::Bodies::Spring, AnimatSim::Environment::Joint, AnimatSim::Environment::Bodies::MuscleBase, AnimatSim::Environment::Bodies::LinearHillStretchReceptor, AnimatSim::Environment::Bodies::Stomach, AnimatSim::Environment::Bodies::Mouth, AnimatSim::Environment::Joints::Hinge, BulletAnimatSim::Environment::Joints::BlHinge, BulletAnimatSim::Environment::Joints::BlPrismatic, RoboticsAnimatSim::Environment::Joints::RbHinge, VortexAnimatSim::Environment::Bodies::VsSpring, AnimatSim::Environment::Bodies::OdorSensor, RoboticsAnimatSim::Environment::Joints::RbPrismatic, VortexAnimatSim::Environment::Bodies::VsLinearHillMuscle, VortexAnimatSim::Environment::Bodies::VsLinearHillStretchReceptor, BulletAnimatSim::Environment::Bodies::BlLinearHillMuscle, RoboticsAnimatSim::Environment::Bodies::RbLinearHillMuscle, BulletAnimatSim::Environment::Bodies::BlLinearHillStretchReceptor, RoboticsAnimatSim::Environment::Bodies::RbLinearHillStretchReceptor, BulletAnimatSim::Environment::Bodies::BlSpring, and RoboticsAnimatSim::Environment::Bodies::RbSpring.
Definition at line 393 of file BodyPart.cpp.
References m_iSynchCount, and AnimatSim::Node::ResetSimulation().
Referenced by AnimatSim::Environment::Joint::ResetSimulation(), and AnimatSim::Environment::RigidBody::ResetSimulation().
Here is the call graph for this function: Here is the caller graph for this function:
|
virtual |
Called when this object has been resized.
This method is called when an item is resized. It is overloaded in the derived class and allows that child class to perform any necessary graphics/physics calls for the resize event.
Reimplemented in AnimatSim::Environment::Bodies::LineBase.
Definition at line 141 of file BodyPart.cpp.
References AnimatSim::Environment::MovableItem::m_lpCallback, AnimatSim::Environment::MovableItem::m_lpPhysicsMovableItem, and AnimatSim::IMovableItemCallback::SizeChanged().
Referenced by AnimatSim::Environment::Bodies::Mesh::CollisionMeshType(), AnimatSim::Environment::Bodies::Mesh::ConvexMeshFile(), AnimatSim::Environment::Bodies::Cylinder::Height(), AnimatSim::Environment::Bodies::Cone::Height(), AnimatSim::Environment::Bodies::Box::Height(), AnimatSim::Environment::Bodies::Box::HeightSections(), AnimatSim::Environment::Bodies::Torus::InsideRadius(), AnimatSim::Environment::Bodies::Sphere::LatitudeSegments(), AnimatSim::Environment::Bodies::Ellipsoid::LatSegments(), AnimatSim::Environment::Bodies::Box::Length(), AnimatSim::Environment::Bodies::Box::LengthSections(), AnimatSim::Environment::Bodies::Plane::LengthSegments(), AnimatSim::Environment::Bodies::Ellipsoid::LongSegments(), AnimatSim::Environment::Bodies::Sphere::LongtitudeSegments(), AnimatSim::Environment::Bodies::Cone::LowerRadius(), AnimatSim::Environment::Bodies::Ellipsoid::MajorRadius(), AnimatSim::Environment::Bodies::Mesh::MeshFile(), AnimatSim::Environment::Bodies::Ellipsoid::MinorRadius(), AnimatSim::Environment::Bodies::Torus::OutsideRadius(), AnimatSim::Environment::Bodies::Cylinder::Radius(), AnimatSim::Environment::Bodies::Sphere::Radius(), AnimatSim::Environment::Bodies::Sensor::Radius(), AnimatSim::Environment::Bodies::LineBase::Resize(), AnimatSim::Environment::Bodies::Torus::Rings(), AnimatSim::Environment::Bodies::Cylinder::Sides(), AnimatSim::Environment::Bodies::Torus::Sides(), AnimatSim::Environment::Bodies::Cone::Sides(), AnimatSim::Environment::Bodies::Plane::Size(), AnimatSim::Environment::Joint::Size(), AnimatSim::Environment::Bodies::Cone::UpperRadius(), AnimatSim::Environment::Bodies::Box::Width(), AnimatSim::Environment::Bodies::Box::WidthSections(), and AnimatSim::Environment::Bodies::Plane::WidthSegments().
Here is the call graph for this function:
|
virtual |
This is how often we need to update this particular adapter.
For example, if you are using a round robin scheme with a robot IO update time of 5 ms with 4 motors, then you would set this to be 20 ms.
Definition at line 184 of file BodyPart.cpp.
References m_fltSynchUpdateInterval.
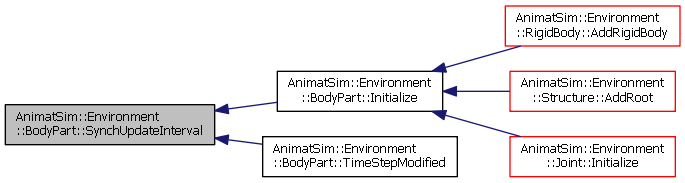
Referenced by Initialize(), and TimeStepModified().
Here is the caller graph for this function:
|
virtual |
Determines how often we need to update this particular adapter.
| fltVal | interval. |
Definition at line 194 of file BodyPart.cpp.
References m_fltSynchUpdateInterval, m_iSynchUpdateInterval, AnimatSim::AnimatBase::m_lpSim, AnimatSim::Simulator::PhysicsTimeStep(), and StdUtils::Std_IsAboveMin().
Here is the call graph for this function:
|
virtual |
Gets whether the m_bRobotAdpaterSynch flag applies to this adapter.
Adpaters between neural elements should not need to be synched because they are not dependent on IO timing. This flag allows you to control this by setting it to false for adapters that do not need it.
Definition at line 162 of file BodyPart.cpp.
References m_bSynchWithRobot.
|
virtual |
Determines whether the m_bRobotAdpaterSynch flag applies to this adapter.
| bVal | Synch status of this adapter. |
Definition at line 172 of file BodyPart.cpp.
References m_bSynchWithRobot.
|
virtual |
If the time step is modified then we need to recalculate the length of the delay buffer.
If a neural module has been assigned to this adapter then that is its target module and we need to use the time step associated with it to determine how big the delay buffer should be in length. If the module is NULL then the target for this adapter is the physics engine and we should use the physics time step instead.
Reimplemented from AnimatSim::AnimatBase.
Reimplemented in BulletAnimatSim::Environment::Joints::BlPrismatic.
Definition at line 369 of file BodyPart.cpp.
References m_fltSynchUpdateInterval, SynchUpdateInterval(), and AnimatSim::AnimatBase::TimeStepModified().
Here is the call graph for this function:
|
protectedvirtual |
Called to collect any body data for this part.
Reimplemented from AnimatSim::Node.
Reimplemented in AnimatSim::Environment::Joints::Hinge.
Definition at line 80 of file BodyPart.cpp.
References AnimatSim::Environment::MovableItem::m_lpPhysicsMovableItem.
Referenced by RoboticsAnimatSim::Environment::Joints::RbPrismatic::StepSimulation(), VortexAnimatSim::Environment::Joints::VsPrismatic::StepSimulation(), BulletAnimatSim::Environment::Joints::BlPrismatic::StepSimulation(), AnimatSim::Environment::Joint::StepSimulation(), AnimatSim::Environment::RigidBody::StepSimulation(), and AnimatSim::Environment::Joints::Hinge::UpdateData().
Here is the caller graph for this function:
|
virtual |
UpdateData is called during this body parts sim update call, and before any of its child updates because those children may need import information like this parts position. However, there are a number of pieces of information that are not critical to the part itself, but that a user may have asked for. I do not want to collect that info for every part if it is not needed. So instead, if a user asks for it then this part is added to a list on the simulation. After all parts have been updated for a simulation step then we loop through the list of just the necessary parts and call UpdateExtraData to collect this additional data. It is important that this be done after all parts have stepped becasue some of this data will only be correct at the end. An example of this is force applied to a part. Forces can be added by any child parts, so it is only at the end that these values are valid.
Definition at line 98 of file BodyPart.cpp.
References AnimatSim::Environment::MovableItem::m_lpPhysicsMovableItem.
|
virtual |
Updates the physics position from graphics.
This updates the position of the physcis node directly from the scenegraph position of the graphics node for this item, and then does the same for all child items.
Reimplemented in AnimatSim::Environment::RigidBody, and AnimatSim::Environment::Joint.
Definition at line 416 of file BodyPart.cpp.
|
virtual |
Called when the visual selection mode changed in GUI.
In the GUI the user can select several different types of visual selection modes This method is called any time that the user switches the selection mode in the GUI. This allows us to change the current Alpha value of the objects so the display is correct.
| iNewMode | The new VisualSelectionMode. |
Reimplemented from AnimatSim::Environment::MovableItem.
Definition at line 230 of file BodyPart.cpp.
References AnimatSim::AnimatBase::VisualSelectionModeChanged(), and AnimatSim::Environment::MovableItem::VisualSelectionModeChanged().
Here is the call graph for this function:
|
protected |
Determines whether the m_bRobotAdpaterSynch flag applies to this adapter. Adpaters between neural elements should not need to be synched because they are not dependent on IO timing. This flag allows you to control this by setting it to false for adapters that do not need it.
Definition at line 39 of file BodyPart.h.
Referenced by BodyPart(), and SynchWithRobot().
|
protected |
This is an interface references to the Vs version of this object. It will allow us to call methods directly in the Vs (OSG) version of the object directly without having to overload a bunch of methods in each box, sphere, etc..
Definition at line 31 of file BodyPart.h.
Referenced by AnimatSim::Environment::RigidBody::AddContactSensor(), AnimatSim::Environment::RigidBody::AddForceAtLocalPos(), AnimatSim::Environment::RigidBody::AddForceAtWorldPos(), AnimatSim::Environment::RigidBody::AddRigidBody(), AnimatSim::Environment::RigidBody::AddTorque(), AnimatSim::Environment::RigidBody::AngularDrag(), AnimatSim::Environment::RigidBody::AngularVelocityDamping(), BodyPart(), AnimatSim::Environment::RigidBody::BuoyancyCenter(), AnimatSim::Environment::RigidBody::BuoyancyScale(), AnimatSim::Environment::RigidBody::Density(), AnimatSim::Environment::RigidBody::DisableCollision(), AnimatSim::Environment::RigidBody::EnableCollision(), AnimatSim::Environment::RigidBody::EnableFluids(), AnimatSim::Environment::RigidBody::GetDensity(), AnimatSim::Environment::RigidBody::GetMass(), AnimatSim::Environment::RigidBody::GetVelocityAtPoint(), AnimatSim::Environment::RigidBody::GetVolume(), AnimatSim::Environment::RigidBody::IsStickyPart(), AnimatSim::Environment::RigidBody::LinearDrag(), AnimatSim::Environment::RigidBody::LinearVelocityDamping(), AnimatSim::Environment::RigidBody::Magnus(), AnimatSim::Environment::RigidBody::MaterialID(), PhysicsBody(), AnimatSim::Environment::RigidBody::RemoveCollisionExclusions(), AnimatSim::Environment::RigidBody::RemoveContactSensor(), AnimatSim::Environment::RigidBody::RemoveRigidBody(), AnimatSim::Environment::RigidBody::SimPausing(), AnimatSim::Environment::RigidBody::StepSimulation(), and AnimatSim::Environment::RigidBody::UpdatePhysicsPosFromGraphics().
 1.8.10
1.8.10